Питер Бентли - Всё об искусственном интеллекте за 60 минут

- Название:Всё об искусственном интеллекте за 60 минут
- Автор:
- Жанр:
- Издательство:АСТ
- Год:2020
- Город:Москва
- ISBN:978-5-17-123535-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Питер Бентли - Всё об искусственном интеллекте за 60 минут краткое содержание
Для широкого круга читателей.
Всё об искусственном интеллекте за 60 минут - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
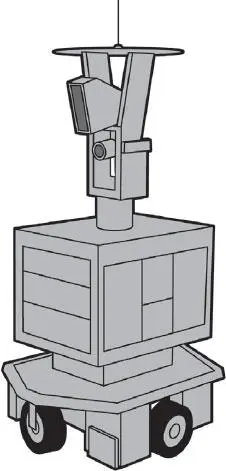
Таким было состояние робототехники в 1972 году. Шейки (чей мозг создавался на основе большого компьютера) мог использовать камеру, чтобы распознавать простые объекты вокруг себя, строить модель своего примитивного мира и планировать, куда идти и что делать, а также прогнозировать, как его действия будут менять эту его внутреннюю модель. Шейки не был очень быстрым или очень умным, но он представлял собой революцию в исследованиях ИИ. Впервые ИИ позволил роботу ориентироваться и выполнять действия (хотя и в очень дружелюбной среде).
Это стало отличным началом, но сложности по-прежнему оставались. Планирование и принятие решений требовали большого количества вычислительных мощностей, поэтому – вспомним также об ограниченности обзора тогдашних систем – Шейки и роботы, подобные ему, были медлительны, ненадежны и не могли работать в условиях реального мира. Этот способ создания разумных роботов считался общепринятым, но исследователи понимали, что добиваться прогресса становится все труднее. Так возникло желание внести немного беспорядка в логичный и понятный подход к робототехнике. И это привело к разделению исследователей на два лагеря: «чистюль» и «грязнуль».
Конструкция роботов сложна. Достаточно непросто заставить их двигаться, но проблемы, связанные с контролем и восприятием окружающего мира, – это та область, где необходима помощь ИИ. В 1960 году, когда полностью работоспособного ИИ еще не существовало, роботы выглядели достаточно пугающе. Разработанный компанией General Electric между 1965 и 1971 годом Hardiman был одним из таких роботов. Задуманный в качестве экзоскелета для человека (вдохновившего создание экзоскелета-погрузчика, который носила героиня фильма «Чужие» Эллен Рипли), костюм мог совершать лишь резкие неконтролируемые движения, и разработчики так и не смогли заставить его выполнять работу не только одной рукой. Beast («Зверь») Джона Хопкинса, усложненная версия робота Elsie Грея Уолтера, управлявшаяся несколькими транзисторами, что позволяло ему случайным образом бродить по залам Университета Джона Хопкинса и подключаться к розеткам для подзарядки, стал более успешным. Walking Truck («Ходячий грузовик») – еще один робот, созданный General Electric в 1965 году. Эта тяжелая машина предназначалась для доставки оборудования по пересеченной местности. Его движение не контролировалось компьютером – требовалось, чтобы умелый оператор управлял четырьмя металлическими ногами, используя свои собственные руки и ноги.
Слоны не играют в шахматы
Тогда как «чистюли» предпочитали тщательно разработанные и математически выверенные методы, «грязнули» заявляли, что такие методы работают лишь в искусственно созданном мире. Если вы пытаетесь создать робота, который может передвигаться и понимать свой мир, то предположение, что окружающая действительность идеальна, приведет к провалу. Родни Брукс, основатель компании iRobot и создатель роботов-пылесосов iRoomba , резюмировал свою критику в оригинальной статье под названием «Слоны не играют в шахматы». В ней он утверждал, что ориентация ИИ на логические игры не имеет ничего общего с разумным поведением в реальном мире. Умение хорошо играть в шахматы не поможет вам ходить, избегать препятствий или справляться с постоянно меняющимися условиями нашей действительности. Робот не должен строить логические внутренние модели, состоящие из символов, составлять план, манипулируя и производя поиск этих символов, а затем использовать результат для корректировки своего поведения. Вместо этого, чтобы достигнуть успехов в практическом роботостроении, нам следует разрабатывать «приземленный» ИИ.
Брукс – практик, и после многолетнего опыта создания роботов он нашел другой подход. Он считает, что мир – это лучшая модель, поэтому мы должны позволить ему напрямую влиять на поведение робота без каких-либо символов – мы должны связать восприятие с действием.
Эту идею впервые исследовал Грей Уолтер с его роботами-черепахами, как вы помните из первой главы. Брукс назвал свой подход «предикативной архитектурой». В соответствии с ним поведением робота управляет ряд простых модулей, каждый из которых прерывает другого, если его потребности становятся первоочередными. К примеру, один робот отвечает за перемещение робота к цели, другой – за преодоление препятствий. Первый будет иметь приоритет, пока не возникнет что-то неожиданное и второй модуль не перехватит контроль. Брукс представлял поведение, используя системы с конечным числом состояний.
Мы утверждаем, что идея символьной системы, на которой основан классический ИИ, в корне неверна.
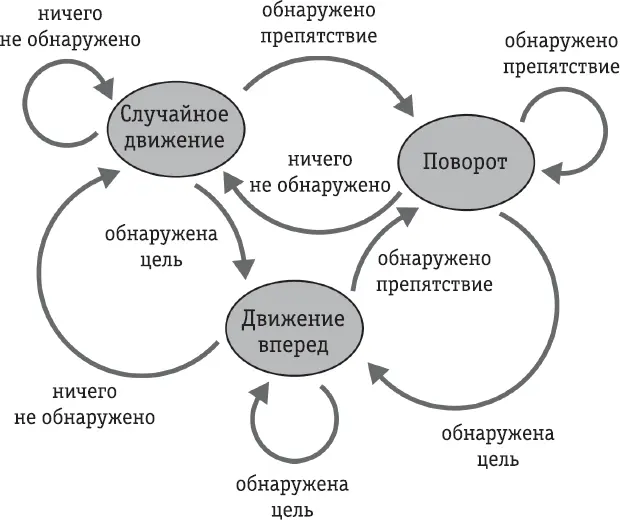
РОДНИ БРУКС (1990)Конечные автоматы – это типичный вариант архитектуры «мозга» роботов. Они работают, определяя последовательность состояний, в которых может находиться робот. Например, у очень простого робота может быть три состояния: случайное движение, движение вперед и поворот. Он может переходить из одного состояния в другое, получая определенные сигналы. Поэтому каждый раз, когда робот определяет цель, он переключается в состояние движения вперед (или поддерживает его). Если же робот обнаруживает впереди препятствие, он переключается в состояние поворота (или поддерживает его). Если ничего не происходит, он переключается в состояние случайного движения (или поддерживает его, см. схему). Это задает простую архитектуру, в которой робот случайным образом движется, избегая препятствий, пока не найдет цель. Если добавить дополнительные конечные автоматы, подключенные к одним и тем же датчикам и исполнительным механизмам, и дать некоторым из них приоритет над другими в зависимости от сигналов с датчиков и состояний, можно получить предикативную архитектуру.
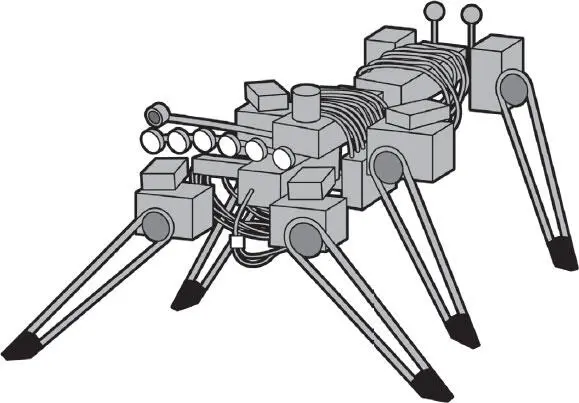
Брукс объяснял это так: «Если я пытаюсь быстро добраться куда-то, я не думаю о том, куда поставить ноги. За движение моих ног отвечает другой уровень [сознания]. Отдельные процессы идут параллельно. Это идея, основанная на поведенческом подходе». Шестиногий робот Брукса по имени Genghis использовал 57 объединенных автоматов.
Этот подход привел к легкому и быстрому запуску ИИ, который позволял роботам делать больше, чем когда-либо прежде, используя при этом меньше вычислений. Брукс продемонстрировал эффективность своего подхода с помощью многочисленных проектов (и компаний), в рамках которых впервые было разработано множество различных типов роботов, в том числе марсоход Sojourner («Странник»).
Читать дальшеИнтервал:
Закладка:

![Коллектив авторов - Что мы думаем о машинах, которые думают [Ведущие мировые ученые об искусственном интеллекте]](/books/1100273/kollektiv-avtorov-chto-my-dumaem-o-mashinah-kotorye.webp)