Андрей Робачевский - Операционная система UNIX

- Название:Операционная система UNIX
- Автор:
- Жанр:
- Издательство:BHV - Санкт-Петербург
- Год:1997
- Город:Санкт-Петербург
- ISBN:5-7791-0057-8
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Андрей Робачевский - Операционная система UNIX краткое содержание
Книга посвящена семейству операционных систем UNIX и содержит информацию о принципах организации, идеологии и архитектуре, объединяющих различные версии этой операционной системы.
В книге рассматриваются: архитектура ядра UNIX (подсистемы ввода/вывода, управления памятью и процессами, а также файловая подсистема), программный интерфейс UNIX (системные вызовы и основные библиотечные функции), пользовательская среда (командный интерпретатор shell, основные команды и утилиты) и сетевая поддержка в UNIX (протоколов семейства TCP/IP, архитектура сетевой подсистемы, программные интерфейсы сокетов и TLI).
Для широкого круга пользователей
Операционная система UNIX - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Текущие и фоновые группы процессов
Как было показано, для каждого управляющего терминала существует сеанс, включающий одну или несколько групп процессов. Одна из этих групп является текущей (foreground group), а остальные фоновыми (background group). [27] Наличие текущей и фоновых групп процессов в сеансе работы пользователя зависит от возможности командного интерпретатора управлять заданиями (job control). При отсутствии этой возможности все процессы будут выполняться в той же группе, что и shell.
Сигналы SIGINTи SIGQUIT, которые генерируются драйвером терминала, посылаются всем процессам текущей группы. Попытка процессов фоновых групп осуществить доступ к управляющему терминалу, как правило, вызывает отправление им сигналов SIGSTP, SIGTTINили SIGTTOU.
Рассмотрим следующие команды:
$ find / -name foo &
$ cat | sort
При этом происходит чтение ввода пользователя с клавиатуры ( cat(1) и сортировка введенных данных ( sort(1) ). Если интерпретатор поддерживает управление заданиями, оба процесса, созданные для программ cat(1) и sort(1) , будут помещены в отдельную группу. Это подтверждается выводом команды ps(1) :
$ ps -efj | egrep "PID|andy"
UID PID PPID PGID SID С STIME TTY TIME CMD
andy 2436 2407 2435 2407 1 15:51:30 tty01 0:00 sort
andy 2431 2407 2431 2407 0 15:51:25 tty01 0:00 find / -name foo
andy 2407 2405 2407 2407 0 15:31:09 tty01 0:00 -sh
andy 2435 2407 2435 2407 0 15:51:30 tty01 0:00 cat
Все четыре процесса (sh, find, cat и sort) имеют один и тот же идентификатор сеанса, связанного с управляющим терминалом tty01. Процессы cat(1) и sort(1) принадлежат одной группе, идентификатор которой (2435) отличен от идентификатора группы командного интерпретатора (2407). То же самое можно сказать и о процессе find(1) , который является лидером отдельной группы (2431). Можно также заметить, что процессы sh(1) , find(1) и cat(1) являются лидерами групп, a еще sh(1) и лидером сеанса.
Хотя команда ps(1) не указывает, какие группы являются фоновыми, а какая текущей, синтаксис команд позволяет утверждать, что командный интерпретатор помещает cat(1) и sort(1) в текущую группу. Это, во-первых, позволяет процессу cat(1) читать данные со стандартного потока ввода, связанного с терминалом tty01. Во-вторых, пользователь имеет возможность завершить выполнение обоих процессов путем нажатия клавиши < Del > (или < Ctrl >+< C >), что вызовет генерацию сигнала SIGINT. Получение процессами этого сигнала вызовет завершение их выполнения (действие по умолчанию), если, конечно, процесс не установил игнорирование SIGINT. На рис. 2.13. представлена схема взаимодействия управляющего терминала, сеанса и групп процессов для приведенного выше примера. Более детально взаимосвязь между терминалом и процессами рассмотрена в следующей главе.
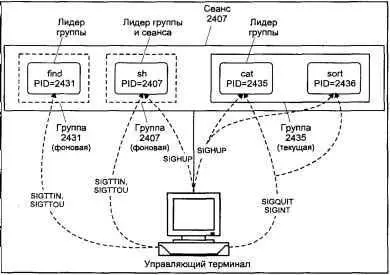
Рис. 2.13. Связь между управляющим терминалом, сеансом и группами
Если командный интерпретатор не поддерживает управление заданиями, оба процесса станут членами той же группы, что и сам shell. В этом случае командный интерпретатор должен позаботиться об игнорировании сигналов SIGINTи SIGQUIT, чтобы допустимые действия пользователя (такие как нажатие клавиши < Del > или < Ctrl >+< C >) не привели к завершению выполнения shell и выходу из системы.
Ограничения
UNIX является многозадачной системой. Это значит, что несколько процессов конкурируют между собой при доступе к различным ресурсам. Для "справедливого" распределения разделяемых ресурсов, таких как память, дисковое пространство и т.п., каждому процессу установлен набор ограничений. Эти ограничения не носят общесистемного характера, как, например, максимальное число процессов или областей, а устанавливаются для каждого процесса отдельно. Для получения информации о текущих ограничениях и их изменения предназначены системные вызовы getrlimit(2) и setrlimit(2) :
#include
#include
int getrlimit{int resource, struct rlimit *rlp);
int setrlimit(int resource, const struct rlimit *rlp);
Аргумент resourceопределяет вид ресурса, для которого мы хотим узнать или изменить ограничения процесса. Структура rlimitсостоит из двух полей:
rlim_t rlim_cur;
rlim_t rlim_max;
определяющих, соответственно, изменяемое (soft) и жесткое (hard) ограничение. Первое определяет текущее ограничение процесса на данный ресурс, а второе — максимальный возможный предел потребления ресурса. Например, изменяемое ограничение на число открытых процессом файлов может составлять 64, в то время как жесткое ограничение равно 1024.
Любой процесс может изменить значение текущего ограничения вплоть до максимально возможного предела. Жесткое ограничение может быть изменено в сторону увеличения предела потребления ресурса только процессом с привилегиями суперпользователя. Обычные процессы могут только уменьшить значение жесткого ограничения. Обычно ограничения устанавливаются при инициализации системы и затем наследуются порожденными процессами (хотя в дальнейшем могут быть изменены).
Вообще говоря, максимальный возможный предел потребления ресурса может иметь бесконечное значение. Для этого необходимо установить значение rlim_maxравным RLIM_INFINITY. В этом случае физические ограничения системы (например, объем памяти и дискового пространства) будут определять реальный предел использования того или иного ресурса.
Различные ограничения и связанные с ними типы ресурсов приведены в табл. 2.21.
Таблица 2.21. Ограничения процесса (значения аргумента resource)
| Ограничение | Тип ресурса | Эффект |
|---|---|---|
RLIMIT_CORE |
Максимальный размер создаваемого файла core, содержащего образ памяти процесса. Если предел установлен равным 0, файл coreсоздаваться не будет. | После создания файла core запись в этот файл будет остановлена при достижении предельного размера. |
RLIMIT_CPU |
Максимальное время использования процессора в секундах. | При превышении предела процессу отправляется сигнал SIGXCPU. |
RLIMIT_DATA |
Максимальный размер сегмента данных процесса в байтах, т.е. максимальное значение смещения брейк-адреса. | При достижении этого предела последующие вызовы функции brk(2) завершатся с ошибкой ENOMEM. |
RLIMIT_FSIZE |
Максимальный размер файла, который может создать процесс. Если значение этого предела равно 0, процесс не может создавать файлы. | При достижении этого предела процессу отправляется сигнал SIGXFSZ. Если сигнал перехватывается или игнорируется процессом, последующие попытки увеличить размер файла закончатся с ошибкой EFBIG. |
RLIMIT_NOFILE |
Максимальное количество назначенных файловых дескрипторов процесса. | При достижении этого предела, последующие попытки получить новый файловый дескриптор закончатся с ошибкой EMFlLE. |
RLIMIT_STACK |
Максимальный размер стека процесса. | При попытке расширить стек за установленный предел отправляется сигнал SIGSEGV. Если процесс перехватывает или игнорирует сигнал и не использует альтернативный стек с помощью функции sigaltstack(2) , диспозиция сигнала устанавливается на действие по умолчанию перед отправкой процессу. |
RLIMIT_VMEM |
Максимальный размер отображаемой памяти процесса в байтах. (Предел определен в версиях System V.) | При достижении этого предела последующие вызовы brk(2) или mmap(2) завершатся с ошибкой ENOMEM. |
RLIMIT_NPROC |
Максимальное число процессов с одним реальным UID. Определяет максимальное число процессов, которые может запустить пользователь. (Предел определен в версиях BSD UNIX.) | При достижении этого предела, последующие вызовы fork(2) для порождения нового процесса завершатся с ошибкой EAGAIN. |
RLIMIT_RSS |
Максимальный размер в байтах резидентной части процесса (RSS — Resident Set Size). Определяет максимальное количество физической памяти, предоставляемой процессу. (Предел определен в версиях BSD UNIX.) | Если система ощущает недостаток памяти, ядро освободит память за счет процессов, превысивших свой RSS. |
RLIMIT_MEMLOCK |
Максимальный физической памяти (физических страниц) в байтах, который процесс может заблокировать с помощью системного вызова mlock(2) . (Предел определен в версиях BSD UNIX.) | При превышении предела системный вызов mlock(2) завершится с ошибкой EAGAIN. |
В заключение приведем пример программы, выводящий на экран установленные ограничения для процесса:
Читать дальшеИнтервал:
Закладка: