Александр Кручинин - Операционные системы

- Название:Операционные системы
- Автор:
- Жанр:
- Издательство:Литагент БИБКОМ
- Год:2009
- Город:Оренбург
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Александр Кручинин - Операционные системы краткое содержание
Операционные системы - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
2.3.2 Примитивы межпроцессного взаимодействия
Решение Петерсона и с помощью команды TSL корректны, но у них один и тот же недостаток – использование активного ожидания. Т.е. процесс входит в цикл, ожидая возможности войти в критическую область.
Помимо бесцельной траты времени процессора на выполнение данного цикла, существует так называемая проблема инверсии приоритета. Суть её в следующем. Процессу с низким приоритетом никогда не будет предоставлено процессорное время, если в это время выполняется процесс с высоким приоритетом. Таким образом, если процесс с низким приоритетом находится в критической области, а процесс с высоким приоритетом, заканчивая операцию ввода-вывода, оказывается в режиме ожидания, то процессорное время будет отдано процессу с высоким приоритетом. В результате процесс с низким приоритетом никогда не выйдет из критической области, а процесс с высоким приоритетом будет бесконечно выполнять цикл.
Поэтому вместо циклов ожидания применяются примитивы межпроцессного взаимодействия, которые блокируют процессы в случае запрета на вход в критическую область. Одной из простейших является пара примитивов sleep и wakeup . Примитив sleep – системный запрос, в результате которого вызывающий процесс блокируется, пока его не запустит другой процесс. У запроса wakeup есть один параметр – процесс, который следует запустить. Также возможно наличие одного параметра у обоих запросов – адреса ячейки памяти, используемой для согласования запросов ожидания и запуска.
Два процесса совместно используют буфер ограниченного размера. Один из них, производитель, помещает данные в буфер, а потребитель считывает их оттуда. Трудности начинаются в тот момент, когда производитель хочет поместить в буфер очередную порцию данных и обнаруживает, что буфер полон. Для производителя решением является ожидание, пока потребитель полностью или частично не очистит буфер. Аналогично, если потребитель хочет забрать данные из буфера, а буфер пуст, потребитель уходит в состояние ожидания и выходит из него, как только производитель положит что-нибудь в буфер и разбудит его.
Это решение кажется достаточно простым, но оно приводит к состояниям состязания. Нужна переменная count для отслеживания количества элементов в буфере. Если максимальное число элементов, хранящихся в буфере, равно N , программа производителя должна проверить, не равно ли N значение count прежде, чем поместить в буфер следующую порцию данных. Если значение count равно N , то производитель уходит в состояние ожидания; в противном случае производитель помещает данные в буфер и увеличивает значение count .
Код программы потребителя прост: сначала проверить, не равно ли значение count нулю. Если равно, то уйти в состояние ожидания; иначе забрать порцию данных из буфера и уменьшить значение count . Каждый из процессов также должен проверять, не следует ли активизировать другой процесс, и в случае необходимости проделывать это. Программы обоих процессов представлены в листинге 4.
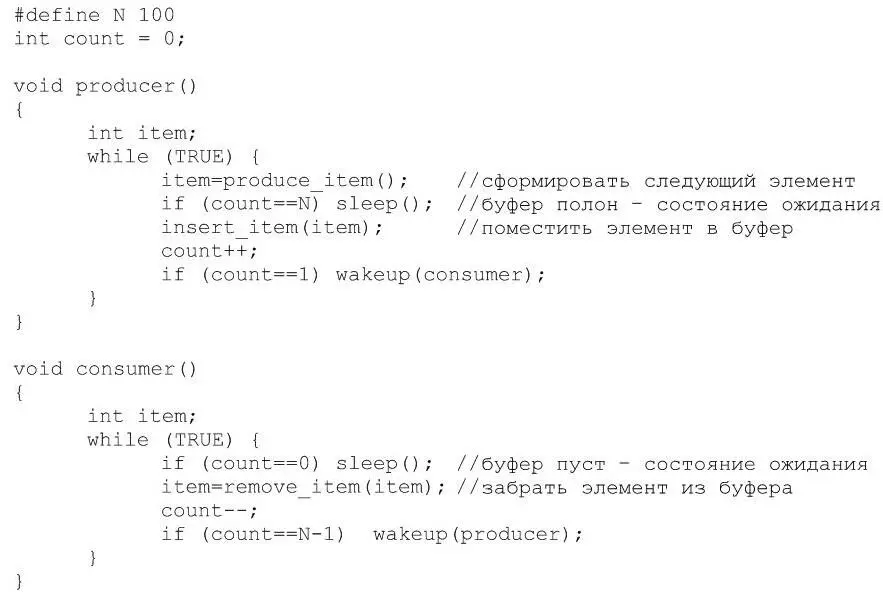
Листинг 4 – Проблема производителя и потребителя с состоянием соревнования
Для описания на языке С системных вызовов sleep и wakeup они были представлены в виде вызовов библиотечных процедур. В стандартной библиотеке С их нет, но они будут доступны в любой системе, в которой присутствуют такие системные вызовы. Процедуры insert_item и remove_item помещают элементы в буфер и извлекают их оттуда.
Возникновение состояния состязания возможно, поскольку доступ к переменной count не ограничен. Может возникнуть следующая ситуация: буфер пуст, и потребитель только что считал значение переменной count , чтобы проверить, не равно ли оно нулю. В этот момент планировщик передал управление производителю, производитель поместил элемент в буфер и увеличил значение count , проверив, что теперь оно стало равно 1. Зная, что перед этим оно было равно 0 и потребитель находился в состоянии ожидания, производитель активизирует его с помощью вызова wakeup .
Но потребитель не был в состоянии ожидания, так что сигнал активизации пропал впустую. Когда управление перейдет к потребителю, он вернется к считанному когда-то значению count , обнаружит, что оно равно 0, и уйдет в состояние ожидания. Рано или поздно производитель наполнит буфер и также уйдет в состояние ожидания. Оба процесса так и останутся в этом состоянии.
Суть проблемы в данном случае состоит в том, что сигнал активизации, пришедший к процессу, не находящемуся в состоянии ожидания, пропадает. Если бы не это, проблемы бы не было. Быстрым решением может быть добавление бита ожидания активизации. Если сигнал активизации послан процессу, не находящемуся в состоянии ожидания, этот бит устанавливается. Позже, когда процесс пытается уйти в состояние ожидания, бит ожидания активизации сбрасывается, но процесс остается активным. Этот бит исполняет роль копилки сигналов активизации.
Несмотря на то, что введение бита ожидания запуска спасло положение в этом примере, легко сконструировать ситуацию с несколькими процессами, в которой одного бита будет недостаточно. Можно добавить еще один бит, или 8, или 32, но это не решит проблему.
В 1965 году Дейкстра [16] предложил использовать семафор – переменную для подсчета сигналов запуска. Семафор – объект синхронизации, который может регулировать доступ к некоторому ресурсу. Также было предложено использовать вместо sleep и wakeup две операции down и up . Их отличие в следующем: если значение семафора больше нуля, то down просто уменьшает его на 1 и возвращает управление процессу, в противном случае процесс переводится в режим ожидания. Все операции проверки значения семафора, его изменения и перевода процесса в состояние ожидания выполняются как единое и неделимое элементарное действие, т.е. в это время ни один процесс не может получить доступ к этому семафору. Операция up увеличивает значение семафора. Если с этим семафором связаны один или несколько ожидающих процессов, которые не могут завершить более раннюю операцию down, один из них выбирается системой и разблокируется. Проблема производителя и потребителя легко решается с помощью семафоров.
Иногда используется упрощенная версия семафора, называемая мьютексом. Мьютекс – переменная, которая может находиться в одном из двух состояний: блокированном или неблокированном. Поэтому для описания мьютекса требуетсявсего один бит. Мьютекс может охранять неразделенный ресурс, к которому в каждый момент времени допускается только один поток, а семафор может охранять ресурс, с которым может одновременно работать не более N потоков.
Читать дальшеИнтервал:
Закладка: