Ерусалимский Львович - Экстерьер собаки и его оценка

- Название:Экстерьер собаки и его оценка
- Автор:
- Жанр:
- Издательство:ИЗДАТЦЕНТР
- Год:2002
- Город:Москва
- ISBN:5-7816-0024-8
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Ерусалимский Львович - Экстерьер собаки и его оценка краткое содержание
Экстерьер собаки и его оценка - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Известно, что тазобедренный сустав собаки, имея наибольшую нагрузку и будучи ответственным за надежность начала движения собаки, устроен по этому принципу: бедренная кость посредством шаровой опоры сопряжена с тазовыми костями под углом 90 градусов.
По этой же причине лопатка и плечевая кость образуют идеальный угол плечелопаточного сочленения при условии их перпендикулярности друг другу. Эти факты, отраженные в законах общего экстерьера собаки в качестве норм, хорошо иллюстрируют действие правила механики как принципа оптимального строения рассмотренных суставов.
Однако требование перпендикулярности прямых (1) и (2) не только иллюстрирует на «высшем уровне» тот же принцип, обеспечивающий наиболее экономичную работу маятника по передаче толчков, но и устанавливает факт ОТСУТСТВИЯ НЕЗАВИСИМОСТИ НАКЛОНОВ ЛОПАТОК И ПОДВЗДОШНЫХ КОСТЕЙ.
Принимая ПРЯМОЙ УГОЛ МАЯТНИКА за НОРМУ этой ЗАВИСИМОСТИ, мы получаем возможность для исходной оценки баланса углов конечностей собаки.
2.1.3. АНАЛИЗ ПОСТУЛАТА 3
Заметим, что угол между прямыми (1) и (2) становится также кинометрическим признаком, и по нему возможно ведение селекции.
Утверждение постулата 3 — требование, чтобы вертикаль, опущенная из оси маятника, проходила через центр тяжести собаки, связано со специальным условием механики — сходящейся системы сил.
Это требование проще всего пояснить на примере собаки, передвигающейся рысью. Односторонние конечности, регулярно сходящиеся под собакой в моменты приземления, максимально приближаются к проекции центра тяжести, что обеспечивает возможность для опорной задней конечности оказать наилучшую поддержку собаке в положении неустойчивого равновесия (рис. 92).
2.1.4. АНАЛИЗ ПОСТУЛАТА 4
Постулат 4, или принцип двух горизонталей, дает практический контроль над частью баланса конечностей в стойке и в движении, углами их сочленений и длинами рычагов (звеньев).
В его основу заложены 2 условия:
• ликвидация килевой качки;
• уменьшение работы по подъему центра тяжести.
Мы уже отмечали ранее, что килевая качка, как правило, возникает по причине короткого и прямо поставленного бедра, этого типичного источника высокозадости собаки, и наносит большой энергетический ущерб движениям собаки на шагу и на рыси по той причине, что значительная часть энергии затрачивается на подъем крестца вместо того, чтобы с минимальными потерями быть посланной холке — этому в норме единственному мускульному центру собаки.
Две названные горизонтали позволяют обеспечить поступательное движение собаки вперед с минимумом энергетических затрат на подъем центра тяжести, т. к. позвоночный свод при такой конструкции остается ровным во время движения собаки рысью или шагом: подъем в крестце практически не происходит за счет того, что тазобедренный сустав при разгибании задней конечности поднимается примерно на столько же, на сколько опускается коленный сустав.
Статистика позволяет утверждать, что собаки, обладающие свойством двух «горизонталей», обладают правильной координацией движений на шагу и на рыси, имеют выраженную высокопередость в стойке и сохраняют ее в необходимой мере во время движения. Для понимания этого феномена рассмотрим теперь амортизационный механизм, состоящий из двух пар расположенных по обе стороны позвоночника «распорок» и «подпорок-распорок».
Каждая пара распорок образована малоподвижной лопаткой и неподвижной подвздошной костью таза. Каждая пара подпорок-распорок образована подвижными плечевой и бедренной костями, которые в стойке играют только роль подпорок, а в движении чередуют роли подпорок и распорок в зависимости от раскрытия или закрытия углов (рис. 93).
Лопатка с плечевой костью, также как и подвздошная кость с бедренной, соединены соответствующими суставами, благодаря которым они колеблются во время движения собаки около прямых (А) и (В) и тем самым существенно смягчают удары, приходящиеся на долю позвоночника.
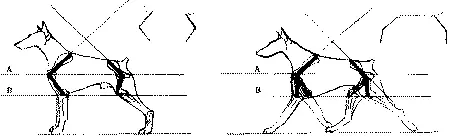
Очевидно, что уже распорки воспринимают на уровне (А) эти удары в смягченном виде, так как подпорки-распорки, работая как рессоры, предварительно погашают их на уровне (В). Благодаря принципу двух горизонталей, этот амортизационный механизм работает в оптимальном режиме, т. к. максимально стабилизирует горизонтальное положение позвоночника при передвижении собаки рысью или шагом. Действительно, только в этом случае возмущающие воздействия, возникающие при толчках и падениях, погашаются подпорками-распорками ОДНОВРЕМЕННО (их оси равновысоки), а затем ОДНОВРЕМЕННО погашаются распорками (их оси также равновысоки), чего не происходит во всех других случаях.
Таким образом, создаются предпосылки для ликвидации килевой качки собаки и минимизации ее работы по подъему центра тяжести. Заметим, что принцип двух горизонталей является кинометрическим признаком, что позволяет вести по нему селекцию.
2.1.5. АНАЛИЗ ПОСТУЛАТА 5
Именно поворотом прямого угла между прямыми (1) и (2) около его вершины и создается феномен изменения формата собаки (рис. 94).
Допустим, что прямой угол между указанными прямыми повернулся по часовой стрелке по оси маятника, так что тазовые кости заняли более наклонное положение по отношению к горизонтали (рис. 94-1). Так как величина угла маятника фиксирована, то лопатка вынуждена занять при этом более косое, т. е. уходящее от вертикали положение. В этом случае длина шага передней ноги удлиняется по сравнению со случаем более отвесного положения лопатки, и для совершения шага той же длины достаточно более короткой передней ноги, т. е. — более короткого предплечья. В результате КОРОЧЕ НОГИ — ДЛИННЕЕ ФОРМАТ.
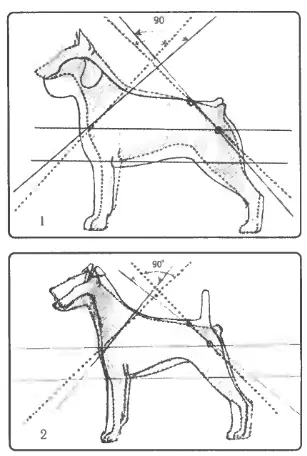
Пусть теперь угол между прямыми (1) и (2) повернулся против часовой стрелки около оси маятника (рис. 94-2). Тогда тазовые кости займут положение, приближающееся к горизонтали, а лопатка, наоборот, приблизится к отвесному положению. Здесь положением лопатки определен более короткий шаг передней ноги, и для того чтобы обеспечить ту же длину шага, что и в предыдущем случае, т. е. скорость, необходима более длинная нога, т. е. более длинное предплечье — СОБАКА ПОДНИМАЕТСЯ НА НОГАХ — ФОРМАТ УКОРАЧИВАЕТСЯ. Так в самом общем виде в зависимости от сопряжения маятника с луком мы можем трактовать характер изменения формата.
Читать дальшеИнтервал:
Закладка: