Виктор Млечин - На передних рубежах радиолокации

- Название:На передних рубежах радиолокации
- Автор:
- Жанр:
- Издательство:Литагент «Алгоритм»1d6de804-4e60-11e1-aac2-5924aae99221
- Год:2013
- Город:Москва
- ISBN:978-5-4438-0578-8
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Виктор Млечин - На передних рубежах радиолокации краткое содержание
Радиолокация – это щит и меч страны, – убежден автор, стоявший у истоков создания и внедрения систем радиолокации в СССР, и лично знавший ведущих ученых в области космоса и радиоэлектроники: первого директора предприятия академика А. И. Берга, имя, которого ныне носит Центральный научно-исследовательский радиотехнический институт (ЦНИРТИ, ранее – ЦНИИ-108), министра радиопромышленности СССР П. С. Плешакова, академика А. А. Расплетина, других выдающихся ученых и главных конструкторов направлений.
Как известно, еще в 1905 г. во время русско-японской войны радисты русского флота впервые в мире создали активные помехи сетям радиосвязи японских кораблей. Но секретные работы в области радиолокации начались в 1930-х годах. Работы велись практически параллельно в СССР, США, Германии, Англии и Франции. В 1946 году американские специалисты – Реймонд и Хачертон, бывший сотрудник посольства США в Москве, написали: «Советские учёные успешно разработали теорию радара за несколько лет до того, как радар был изобретён в Англии».
В 1948 году автор попал в Центральный научно-исследовательский институт радиолокации (ЦНИИ-108), в 13 лабораторию, которой руководил А. А. Расплетин, знаменитый конструктор зенитно-ракетных систем.
Более 60 лет, проведенных на ответственном научном направлении, дает автору В. В. Млечину право передать свой бесценный опыт нынешним и будущим поколениям молодых специалистов и тем, кто интересуется закрытыми страницами истории СССР.
На передних рубежах радиолокации - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
В этой части нашего изложения мы начинаем разговор о возможностях противорадиолокации, о тех средствах, которые реально могли бы затруднить или даже сделать невозможным нормальное функционирование РЛС [21]. Но надо понимать, что на всякий выпад неизбежно следует защитная реакция, которую наступающая сторона снова ищет возможности преодолеть. Вместе с тем развитие идёт не только по пути соперничества, но и в направлении поиска и реализации новых технических решений. Ещё раз соглашаешься с классиками, которые многократно повторяли, что движение по пути развития и прогресса происходит путём единства и борьбы противоположностей. Проблемы радиоэлектронной борьбы актуальны как 70 лет назад, так и сейчас. Борьба эта имела различные фазы накала, но и сегодня, в новых условиях, она далеко не затухла. Представляется, что радиоэлектронная борьба будет спутником технического прогресса ещё долгие годы. Наша задача сохранять мирный характер этой борьбы и не допускать её перерастания в военные фазы.
А теперь обратимся к средствам создания помех режиму обнаружения в РЛС. Самым эффективным средством здесь признаны маскирующие шумовые помехи. При действии на импульсную РЛС с фиксированной несущей частотой такая активная помеха засвечивает значительную часть экрана индикатора кругового обзора, делая невозможным оператору обнаружение и засечку целей. Если мощность станции активных помех (САП), формирующей шумовую помеху, достаточно велика, засвечиваются не только части экрана, соответствующие основному лепестку сканирующей в режиме обзора антенны РЛС, но и в более широком секторе углов, перекрывающем боковые лепестки диаграммы направленности антенны (ДНА). При этом РЛС как бы «слепнет», ибо не может разобраться, где же реально в широком секторе засветки находится носитель с источником помехи. Поэтому первой мыслью разработчиков РЛС, работающих в помеховом поле, была попытка снизить действие боковых лепестков ДНА. Тогда сектор засветки мог существенно сузиться, что способствовало бы более точной пеленгации источника помехи. Однако задача снижения уровня боковых лепестков в антенной технике достаточно сложная, особенно её трудно решать для сканирующей по углу антенны. Возникла идея подчеркнуть в РЛС основной лепесток диаграммы и скомпенсировать действие боковых лепестков. Такая компенсационная схема была разработана сначала с помощью вычитающего каскада, к которому наряду с сигналом основного канала подводился сигнал от вспомогательной антенны, фиксирующей уровень отсечки. В дальнейшем эта схема была усовершенствована путём введения корреляционной обратной связи. Мы уже выше говорили о стабилизирующем действии обратной связи. В связи с широким применением подобных компенсационных схем в радиолокации для борьбы с помехами, попробуем разобраться в их работе на основе простейших алгебраических действий, доступных школьникам. Имеется основной приёмный канал РЛС, через который проходит сумма сигнала и помехи. С учётом усиления этого канала K 0имеем на его выходе К 0 u 0= К 0( u сигн+ u п). Через дополнительный канал проходит только помеха, т. е. u доп= u п. Оба напряжения подводятся к вычитающему каскаду, образующему разность, причём u допподводится с некоторым коэффициентом К доп, подлежащим определению. Итак, на выходе вычитающего каскада имеем u вых= К 0 u 0– К доп u доп. Но помеха – случайная величина, поэтому найдём среднее значение для произведения
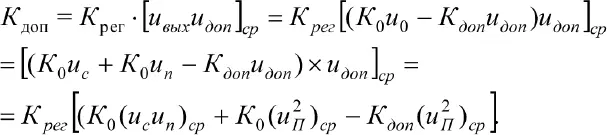
Т. к. помеха не зависит от сигнала. то ( u с u п) ср= 0. Следовательно, имеем равенство

Решая уравнение относительно К доп, найдём
что при К рег (u 2 п ) р>> 1 даёт К доп≈ К 0. Следовательно, коэффициенты усиления основного и дополнительного каналов примерно одинаковые, если обратная связь глубокая. С помощью данного метода удаётся значительно улучшить отношение сигнала к шуму в основном лепестке ДНА. Это был, так сказать, тактический шаг со стороны разработчиков РЛС. Не замедлило появиться и ответное действие создателей САП. Учитывая, что метод использует «крышу», ниже которой сигналы помехи, в том числе действующие по боковым лепесткам, на выход приёмника не проходят, они решили «опустить крышу», направив помеху не на основной, а на ортогональной поляризации. В этом случае все «боковики» вновь вылезают, как грибы, и метод компенсации теряет эффективность. «Хорошо», – сказали на стороне РЛС, но, во-первых, создавать поляризационную помеху вы должны с очень большой точностью, не превышающей единиц градусов, что само по себе представляет определённую задачу, а во-вторых, что вы будете делать, если мы разнесём в пространство приёмную и передающую антенны РЛС? Тогда вы вообще потеряете информацию о поляризации, на которую настроена приёмная антенна. Этот спор, думаю, будет продолжаться и дальше.
Но вернёмся к шумовой помехе. У некоторых читателей может возникнуть вопрос: А почему вы говорите о шумовой помехе, если на цели, т. е. на входе САП имеется принятая от РЛС пачка сигналов, огибающая которых, точно соответствует ДНА РЛС. Продетектируйте принятый сигнал и исказите огибающую. Помеха с такой искажённой огибающей заставит РЛС «стрелять» на 100 или 200 м вбок. Вопрос законный. Именно так делали на заре радиолокации. Тогда основным методом пеленгации целей был метод максимума, согласно которому пеленг цели определялся по максимуму огибающей принятой пачки сигналов. Поэтому разработчики САП могли в то время искажать огибающую, создавая в РЛС ошибки при пеленговании целей. В качестве примера сошлюсь на существовавшую тогда возможность формирования помехи с перевёрнутой, т. е. «провальной» модуляцией огибающей пачки, что приводило в РЛС к срыву пеленгации из-за отсутствия в принятом сигнале каких-либо признаков модуляции. Впоследствии такого вида помехи стали называться инверсными.
РЛС нескольких последних поколений используют другой принцип пеленгации, основанный на двухканальном приёме сигналов, сравнении принятых сигналов и выделении сигнала ошибки. Варианты, получившие широкое применение, образуют в результате сравнения разностный и суммарный сигналы, подаваемые на фазовый детектор, который и создаёт сигнал ошибки. Сравнение сигналов производят по амплитуде или фазе, в соответствии с чем различают амплитудные или фазовые суммарно-разностные моноимпульсные системы пеленгации. Слово «моноимпульсный» означает, что, в принципе, пеленг цели может быть установлен по одному импульсу зондирующего сигнала.
Читать дальшеИнтервал:
Закладка: