Вячеслав Довгань - Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам

- Название:Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам
- Автор:
- Жанр:
- Издательство:Издательство Южного федерального университета
- Год:2015
- Город:Ростов-на-Дону
- ISBN:ISBN 978-5-9275-1532-5
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Вячеслав Довгань - Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам краткое содержание
Книга рассказывает об одном из ярких направлений в истории непилотируемой космонавтики - о создании и развитии лунных проектов, их реализации в Советском Союзе. Фоном для этого автор избрал очерк об этапах, предшествовавших этому, о деятелях и свершениях русских учёных и инженеров в XIX-XX вв., о мощном развитии ракетных исследований в период перед Второй мировой войной и особенно по её завершению. Особое место отведено деятельности советских научных и производственных организаций, военных учреждений и структур в период подготовки и осуществления лунных миссий.
Лунная одиссея отечественной космонавтики. От «Мечты» к луноходам - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Однако лишь через полгода вышло Решение №23 ВПК от 10 февраля 1965 г. с поручением ВНИИ-100 приступить к проектированию и созданию лунохода.
Восьмиколёсное шасси в варианте повышенной надёжности впервые было обосновано сотрудниками ВНИИ-100 в НИР «Разработка шасси самоходного автоматического аппарата для исследования Луны» (тема «Шар»). Отчёт №652519 был утверждён в мае 1965 г., а через месяц С.П. Королёв принял решение сконцентрироваться на исследованиях по освоению космоса, используя пилотируемые средства ракетно-космической техники.
Как уже отмечалось, головной фирмой непилотируемых средств РКТ был определён коллектив М3 им. С.А.Лавочкина, в котором Главным конструктором со 2 марта 1965 г. был утверждён Г.Н. Бабакин. А вот головной организацией нового научного направления - исследования физикомеханических свойств грунта Луны и планет Солнечной системы решением МНТС по космическим исследованиям при АН СССР - был определён ВНИИ-100. В новой кооперации окончательно определились задачи: коллектив из Химок отвечал за создание и доставку на Луну передвижной научной лаборатории, а ленинградский ВНИИ-100 - за создание самоходного шасси лунохода с блоком автоматического управления и системой безопасности движения. В ноябре 1965 г. между двумя предприятиями был заключён договор на работы по лунной тематике.
Техническое задание на ходовую часть лунохода Г.Н.Бабакин подписал 18 июня 1966 г. Работы проводились в основном по трём направлениям: общемашинные разработки (руководитель - В.И. Комиссаров); узлы и отдельные механические системы (руководитель - Г.Н. Корепанов); узлы управления электрических схем и измерительной аппаратуры (руководитель - П.Н. Бродский). В этих разработках принимали участие ведущие специалисты - Е.В. Авотин, И.С.Болховитинов, Ю.И. Васильев, Б.В. Гладких, В.В. Громов, Ю.П. Китляш, Л.Х. Коган, Б.М. Лубенко, М.И. Маленков, A.B. Мицкевич, А.М. Носов, В.Н. Петрига, В.Н. Плохих, Л.Н. Поляков, И.И. Розенцвейг, А.Ф. Соловьёв, Ю.А. Хаханов, Л.Т. Черепанова, Ф.П. Шпак и др. [31].
Первый образец шасси лунохода был изготовлен, доставлен на М3 им. С.А. Лавочкина и сдан в эксплуатацию в начале 1968 г. [32].
К этому времени под руководством Главного конструктора Г.Н. Бабакина была полностью готова вся конструкторская документация по луноходу.
Луноход - это космический аппарат, выполненный в виде дистанционно управляемого транспортного средства (ТС) высокой проходимости с размещённой на нём научной аппаратурой. Это первая в истории космонавтики передвижная научная лаборатория для исследования небесного тела, доставляемая к месту эксплуатации орбитально-космическим комплексом.
Луноход обычно сравнивают с роботом. Но в отличие от робота, он является объектом управления операторами, специально отобранными и подготовленными для этой задачи. Луноход - транспортное средство, экипаж которого находится от него... на расстоянии около 400 000 километров!
Состоял он из двух основных частей: восьмиколёсного самоходного шасси и герметичного приборного отсека [33].
Основные параметры: длина с открытой крышкой (панелью солнечной батареи) - 4,42 м, ширина - 2,15 м, высота - 1,92 м и масса 756 кг.
Самоходное шасси - автоматическая система, осуществляющая передвижение лунохода. Отношение массы шасси к полной массе лунохода составляло 1/9.
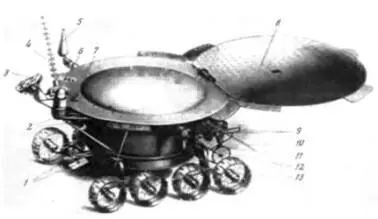
Рис. 32. Луноход: 1 - выносной блок аппаратуры “Рифма»;
2 -телекамеры; 3 - уголковый отражатель; 4 - остронаправленная антенна; 5 - коническая спиральная антенна; 6 - блок рентгеновского телескопа; 7 - блок дозиметра; 8 - панель солнечной батареи;
9 - телефотометры; 10- штыревая антенна; 11 - прибор оценки проходимости; 12 - девятое колесо; 13 - мотор-колесо
В его состав входят: ходовая часть с колёсным движителем и упругой подвеской для движения по неровной местности и на уклонах; электродвигатели и механическая трансмиссия для вращения ведущих колёс и передачи на них необходимых тяговых усилий; блок автоматики шасси (БАШ).
Ходовую часть образуют восемь мотор-колёс, причём, каждое является ведущим. Диаметр каждого из колёс по грунтозацепам составляет 510 мм, ширина - 200 мм. Колёсная база шасси - 170 мм, ширина колеи - 1600 мм. Колёса объединены попарно в четыре блока: два блока колёс левого борта и два - правого борта. При необходимости любое колесо может отключаться от силового привода. Это позволяет сохранять высокую проходимость при выходе из строя привода одного или нескольких колёс. Все колёса неповоротные относительно вертикальной оси. Если колёса вращаются в одном направлении, но частота вращения колёс одного борта выше, чем другого, то происходит поворот с некоторым постоянным радиусом. Если колёса имеют одинаковую частоту вращения, но по бортам вращаются в разные направления, то поворот осуществляется на месте вокруг вертикальной оси симметрии ходовой части. Торможение осуществляется переключением тяговых электродвигателей шасси в режим электродинамического торможения. Для удержания лунохода на уклонах и его полной остановки включаются дисковые тормоза с электромагнитным управлением.
Особенность шасси состоит также в одинаковых характеристиках движения как при движении вперёд, так и при движении задним ходом. Это важно при его дистанционном управлении.
Блок автоматики шасси выполняет четыре основные функции: управление движением; контроль показаний измерительных датчиков и формирование команд безопасности движения; выдачу в телеметрическую систему преобразованных сигналов измерительных датчиков; программирование работы прибора оценки проходимости ПрОПа.
При достижении предельных значений углов крена и дифферента, токов мотор-колёс автоматически срабатывает бортовая система, которая останавливает луноход. Лишь после изучения сложившейся обстановки и принятия решения с наземного пункта выдаётся команда на продолжение движения лунохода.
Приборный отсек, являющийся одновременно несущим корпусом лунохода, имеет форму усечённого конуса с выпуклыми большим верхним и меньшим нижним днищами.
Внутри его для защиты от воздействия внешней среды в условиях космоса размещалась электронная аппаратура, буферная аккумуляторная батарея и преобразовательные устройства научной аппаратуры.
В носовой части лунохода расположены: иллюминаторы для объективов малокадрового телевидения; электромеханический привод остронаправленной антенны (ОНА); неподвижная коническая спиральная малонаправленная антенна; выносной блок аппаратуры определения химического состава поверхностного слоя лунных пород «РИФМА» (рентгеновский изотопный флуоресцентный метод анализа); блок рентгеновского телескопа для измерения интенсивности и углового распределения рентгеновского излучения внегалактического фона; блок дозиметра для изучения радиационной обстановки; уголковый отражатель для лазерной локации Луны.
Читать дальшеИнтервал:
Закладка: