Александр Марков - Эволюция человека том 2 Обезьяны нейроны и душа 2011

- Название:Эволюция человека том 2 Обезьяны нейроны и душа 2011
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Александр Марков - Эволюция человека том 2 Обезьяны нейроны и душа 2011 краткое содержание
Эволюция человека том 2 Обезьяны нейроны и душа 2011 - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Электромеханические устройства на мысленном управлении
Поскольку мысли материальны и складываются из комбинаций нервных импульсов, то нет никаких физических запретов на создание разнообразных инженерно-технических "приложений" к мозгу — устройств на мысленном управлении. Собственно, все тело животного представляет собой именно такое устройство. Но нам, конечно, хотелось бы получить более наглядную демонстрацию. Что-нибудь из металла и пластика, пожалуйста. С электромоторчиками и шестеренками — и чтобы мозг всем этим мог напрямую управлять.
Если бы подобные проекты нужны были только для убеждения упертых идеалистов, игра не стоила бы свеч. Но они нужны не только для этого. Разработка протезов, которыми человек мог бы управлять точно так же, как настоящими конечностями, при помощи мозговых импульсов, является одной из актуальных задач медицины. В последнее время в этой области наблюдается значительный прогресс. И люди, и другие обезьяны уже могут — при посредстве несложных электронных устройств — мысленно управлять движением курсора на экране компьютера. Но управлять курсором куда проще, чем пользоваться таким сложным прибором, как рука, в настоящем трехмерном пространстве.
В 2008 году группа американских нейробиологов, медиков и робототехников сообщила о сенсационном результате: им удалось научить двух макак резусов брать пищу и отправлять ее в рот при помощи механической руки с мысленным управлением ( Velliste et al., 2008 ).
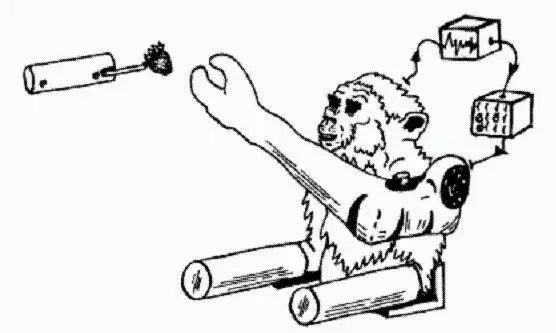
Схема эксперимента. Мозговые импульсы подвергаются компьютерной обработке, и на их основе генерируются сигналы, управляющие движением механической руки. Собственные руки обезьяны зафиксированы в горизонтальных трубках. По рисунку из Velliste et al., 2008.
В экспериментах использовалась искусственная рука, по своим механическим характеристикам близкая к настоящей. У нее пять степеней свободы: она может двигаться в плечевом суставе вверх-вниз, вправо-влево и вращаться вокруг своей оси (три степени свободы), в локтевом суставе она может только сгибаться-разгибаться (четвертая степень свободы); кроме того, она снабжена хватающей "кистью" в виде клешни, которая может сжиматься и разжиматься (пятая степень свободы). Все движения осуществляются при помощи моторчиков с компьютерным управлением.
Ученые вживили двум макакам по 96 электродов в участок моторной коры, управляющий движениями плеча и предплечья. Эти электроды у двух обезьян были немного по-разному распределены. Попадание электродов в те или иные конкретные точки коры было отчасти случайным, и уж во всяком случае никто не мог знать заранее, какие из электродов будут воспринимать мозговые команды, скажем, о подъеме руки, а какие — о сгибании локтя. Это предстояло выяснить в ходе дальнейших экспериментов. Долгий курс обучения должны были пройти не только обезьяны, но и компьютерная программа, интерпретирующая мозговые сигналы и преобразующая их в команды для управления механической рукой.
На начальном этапе обезьян учили управлять рукой при помощи джойстика с кнопкой (кнопка предназначалась для открывания и закрывания клешни). Кроме того, обезьяна просто смотрела на автоматические движения руки, которая брала пищу из разных мест и подносила ее ко рту подопытной (известно, что вкусная пища — чуть ли не единственный стимул, побуждающий обезьяну в лабораторных условиях быть внимательной и чему-то учиться). Пока механическая рука двигалась, а обезьяна на нее смотрела, компьютер регистрировал сигналы, поступающие от 96 электродов, и подвергал их статистической обработке. Сигналы от некоторых датчиков не коррелировали с движениями руки, и эти датчики впоследствии не учитывались. Для остальных электродов компьютер определял, какие движения искусственной руки сопровождаются наиболее интенсивными (частыми) нервными импульсами. Так были выявлены электроды (и соответствующие точки мозга), которые избирательно реагируют на те или иные движения (вверх-вниз, вперед-назад и вправо-влево), а также на сжимание и разжимание пальцев. Соответствующий "рисунок" возбуждения нейронов интерпретировался как команда, посылаемая мозгом. Например, если данные десяти датчиков регистрировали наиболее сильные сигналы при подъеме руки, то в дальнейшем, когда управление рукой передавали обезьяне, сигналы от этих десяти датчиков компьютер преобразовывал в команду "поднять руку".
После этого этапа предварительного обучения исследователи попытались сразу передать обезьянам всю власть над механической рукой, но ничего не вышло: обезьяны не справились с управлением. Тогда пришлось пойти более долгим путем постепенной передачи контроля от "автопилота" обезьяне. При этом училась не только обезьяна, но и компьютер: интерпретация нервных импульсов постоянно уточнялась и подстраивалась к текущему состоянию обезьяньего мозга. Как выяснилось, такая подстройка должна осуществляться ежедневно, потому что компьютерная интерпретация мозговых сигналов, основанная на вчерашних экспериментах, сегодня может для той же самой обезьяны оказаться недостаточно точной. Кроме того, импульсы, генерируемые мозгом во время пассивного наблюдения за автоматически движущейся рукой, оказались не совсем идентичными тем, что генерируются при непосредственном мысленном управлении искусственной конечностью.
Задача, которую обезьяна должна была выполнить при помощи искусственной руки, изо дня в день была одна и та же: нужно было взять пищу (пастилу или ягоду), которая появлялась в разных местах в пределах досягаемости, и поднести ее ко рту (а потом, разумеется, съесть, но это уже делалось без помощи технических средств). Самая трудная часть задания состояла в том, чтобы поднести раскрытую клешню точно к пище. Для этого нужно управлять рукой с точностью до нескольких миллиметров, иначе еду не удастся схватить. Подносить пищу ко рту можно с меньшей точностью, поскольку обезьяна могла шевелить головой (ее руки — настоящие, а не искусственные — были закреплены в специальных трубках).
В течение нескольких недель контроль над искусственной рукой постепенно передавался от автопилота обезьяне. Помощь автопилота, упрощенно говоря, состояла в том, что обезьяне было легче совершать "правильные" движения, чем "неправильные", — искусственная рука охотнее двигалась в нужном направлении, чем в любом другом. Постепенно эта помощь слабела. С точки зрения обезьяны это означало, что задача становилась все более трудной, так что ей приходилось каждый день продолжать учиться, постепенно совершенствуя мастерство владения искусственной рукой.
Читать дальшеИнтервал:
Закладка: