БСЭ БСЭ - Большая Советская Энциклопедия (ГИ)

- Название:Большая Советская Энциклопедия (ГИ)
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
БСЭ БСЭ - Большая Советская Энциклопедия (ГИ) краткое содержание
Большая Советская Энциклопедия (ГИ) - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
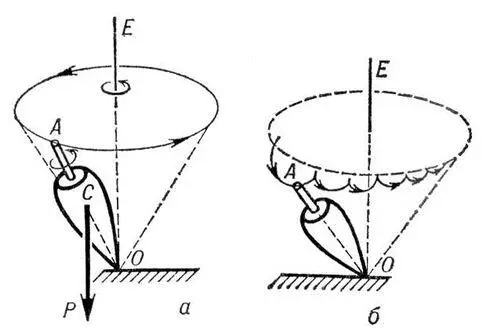
Рис. 5. а — прецессия волчка под действием силы тяжести; б — движение оси волчка при медленном собственном вращении.
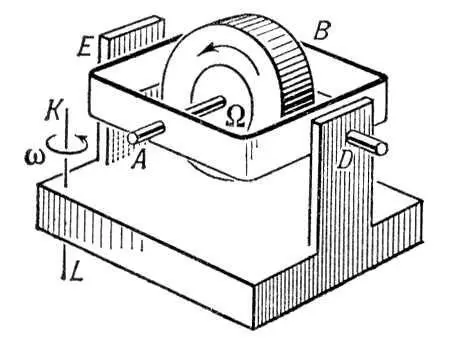
Рис. 7. Гироскоп с двумя степенями свободы.
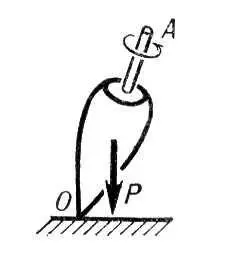
Рис. 1. Волчок; ОА — его ось, Р — сила тяжести.
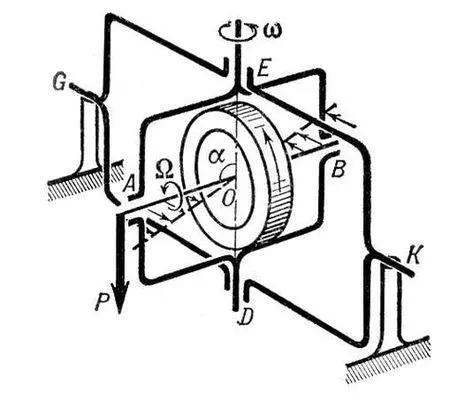
Рис. 3. Действие силы Р на гироскоп с вращающимся ротором; ось АВ движется перпендикулярно направлению Р.
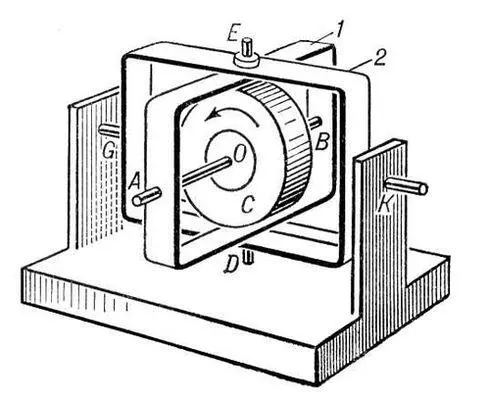
Рис. 2. Гироскоп в кардановом подвесе. Ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE и вместе с рамкой 2 — вокруг оси GK; следовательно, ось ротора может занять любое положение в пространстве. О — центр подвеса, совпадающий с центром тяжести гироскопа.
Гироскоп направления
Гироско'п направле'ния, гироазимут, курсовой гироскоп, гирополукомпас, гироскопическое устройство для определения углов рыскания (изменения курса) и углов поворота объекта вокруг вертикальной оси. При согласовании Г. н. с плоскостью меридиана (например, по данным какого-нибудь компаса) он указывает текущее значение курса объекта. Г. н. представляет собой трёхстепенной астатический (уравновешенный) гироскоп , снабженный горизонтальной и азимутальной системами коррекции (см. рис. ). Горизонтальная система коррекции, удерживающая внутреннее карданово кольцо 2 (ось гироскопа 1 ) в плоскости горизонта, состоит из маятника-корректора 4 , определяющего угол отклонения оси гироскопа от плоскости горизонта, и датчика моментов 5 , прикладывающего к гироскопу соответствующие корректирующие моменты. Азимутальная система коррекции, удерживающая ось гироскопа в заданном азимутальном направлении (т. е. под заданным углом, например, к плоскости меридиана), состоит из датчика моментов 6 и вычислительного устройства 7, вырабатывающего момент азимутальной коррекции. При этом учитываются поправки на вращение Земли и на движение объекта относительно Земли. Азимутальная коррекция Г. н. может также осуществляться от чувствительного элемента, обладающего избирательностью по отношению к стабилизируемому направлению, например от магнитной стрелки (см. Гиромагнитный компас ). Потенциометр 8 служит для съёма углов рыскания и поворота объекта вокруг вертикальной оси. Погрешности Г. н. характеризуются уходами оси гироскопа в азимуте, которые могут составлять от единиц до десятых долей градуса в час.
Г. н. используют для определения углов рыскания и поворота летательных аппаратов и кораблей, а также для кратковременного указания курса. Г. н. может применяться и как чувствительный элемент системы автоматической стабилизации курса объекта, например в автопилоте летательного аппарата, в автомате курса торпеды и др.
А. Ю. Ишлинский, С. С. Ривкин.
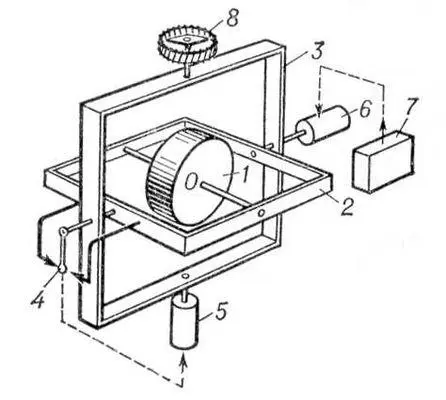
Принципиальная схема гироскопа направления: 1 — ротор; 2, 3 — внутреннее и наружное кардановы кольца; 4 — маятник-корректор; 5, 6 — датчики моментов; 7 — вычислительное устройство; 8 — потенциометр.
Гироскопические устройства
Гироскопи'ческие устро'йства, гироскопические приборы, электромеханические устройства, содержащие гироскопы , и предназначенные для определения параметров, характеризующих движение (или положение) объекта, на котором они установлены, а также для стабилизации этого объекта. Г. у. используют при решении задач навигации, управления подвижными объектами и др.
Наиболее существенными признаками, характеризующими применяемые в технике разнообразные Г. у., являются: тип гироскопа, физический принцип построения чувствительного гироскопического элемента, тип подвеса, назначение Г. у.
Типы гироскопов.Различают два основных типа гироскопов: с тремя и двумя степенями свободы. Гироскопы с тремя степенями свободы делятся на уравновешенные, или астатические, и неуравновешенные, или позиционные.
Астатическим называется гироскоп, у которого центр тяжести совпадает с точкой пересечения осей карданова подвеса (т. е. с точкой подвеса). Сила тяжести не влияет на движение оси такого гироскопа и её уходы при внешних возмущениях могут вызываться лишь моментами сил в осях подвеса (моменты сил трения и др.). При отсутствии моментов внешних сил гироскоп называется свободным. Хотя астатические гироскопы не обладают избирательностью по отношению к заданному направлению, т. е. «направляющей силой», стремящейся привести ось гироскопа в определенное положение, они используются в ряде Г. у., например, в гироскопах направления , гировертикалях и др., причём прецизионные гироскопы могут применяться без корректирующих устройств.
Позиционным называется гироскоп, обладающий избирательностью по отношению к некоторому направлению; при отклонении его оси от этого направления возникает «направляющая сила», стремящаяся вернуть ось гироскопа в заданное положение. Для придания Г. у. позиционных свойств применяют два способа. Первый состоит в смещении центра тяжести гироскопа относительно точки подвеса. Он используется в гирокомпасах , у которых «направляющая сила» возникает при отклонении оси гироскопа от плоскости меридиана, и в гиромаятниках, у которых «направляющая сила» возникает при отклонении оси гироскопа от вертикали места. Др. способ состоит в применении астатического гироскопа и соответствующей системы коррекции, например маятниковой (см. Гировертикаль ).
Гироскопы с двумя степенями свободы используют в Г. у. чаще всего в качестве дифференцирующих и интегрирующих гироскопов, которые осуществляют дифференцирование (или интегрирование) входного сигнала, т. е. измеряют производную (или интеграл) от той величины, на воздействие которой реагирует Г. у. Например, в гиротахометре дифференцирующий гироскоп, реагируя на поворот объекта, измеряет его угловую скорость, а поплавковый интегрирующий гироскоп (см. Гироскопический интегратор ), реагируя на угловую скорость объекта, измеряет угол его поворота.
Читать дальшеИнтервал:
Закладка: