БСЭ БСЭ - Большая Советская Энциклопедия (ГИ)

- Название:Большая Советская Энциклопедия (ГИ)
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
БСЭ БСЭ - Большая Советская Энциклопедия (ГИ) краткое содержание
Большая Советская Энциклопедия (ГИ) - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Наличие рефракции, однако, может приводить к увеличению дальности распространения звука — явлению сверхдальнего распространения звуков под водой. На некоторой глубине под поверхностью воды находится слой, в котором звук распространяется с наименьшей скоростью; выше этой глубины скорость звука увеличивается из-за повышения температуры, а ниже — вследствие увеличения гидростатического давления с глубиной. Этот слой представляет собой своеобразный подводный звуковой канал. Луч, отклонившийся от оси канала вверх или вниз, вследствие рефракции всегда стремится попасть в него обратно ( рис. 2 ). Если поместить источник и приёмник звука в этом слое, то даже звуки средней интенсивности (например, взрывы небольших зарядов в 1—2 кг ) могут быть зарегистрированы на расстояниях в сотни и тысячи км . Существенное увеличение дальности распространения звука при наличии подводного звукового канала может наблюдаться при расположении источника и приёмника звука не обязательно вблизи оси канала, а, например, у поверхности. В этом случае лучи, рефрагируя книзу, заходят в глубоководные слои, где они отклоняются кверху и выходят снова к поверхности на расстоянии в несколько десятков км от источника. Далее картина распространения лучей повторяется и в результате образуется последовательность т. н. вторичных освещенных зон, которые обычно прослеживаются до расстояний в несколько сотен км . Явление сверхдальнего распространения звука в море было открыто независимо американскими учёными М. Ивингом и Дж. Ворцелем (1944) и советскими учёными Л. М. Бреховских и Л. Д. Розенбергом (1946).
На распространение звуков высокой частоты, в частности ультразвуков, когда длины волн очень малы, оказывают влияние мелкие неоднородности, обычно имеющиеся в естественных водоёмах: микроорганизмы, пузырьки газов и т.д. Эти неоднородности действуют двояким образом: они поглощают и рассеивают энергию звуковых волн. В результате с повышением частоты звуковых колебаний дальность их распространения сокращается. Особенно сильно этот эффект заметен в поверхностном слое воды, где больше всего неоднородностей. Рассеяние звука неоднородностями, а также неровностями поверхности воды и дна вызывает явление подводной реверберации , сопровождающей посылку звукового импульса: звуковые волны, отражаясь от совокупности неоднородностей и сливаясь, дают затягивание звукового импульса, продолжающееся после его окончания, подобно реверберации, наблюдающейся в закрытых помещениях. Подводная реверберация — довольно значительная помеха для ряда практических применений Г., в частности для гидролокации .
Пределы дальности распространения подводных звуков лимитируются ещё и т. н. собственными шумами моря, имеющими двоякое происхождение. Часть шумов возникает от ударов волн на поверхности воды, от морского прибоя, от шума перекатываемой гальки и т.п. Другая часть связана с морской фауной; сюда относятся звуки, производимые рыбами и др. морскими животными (подробнее см. Биогидроакустика ).
Г. получила широкое практическое применение, т.к. никакие виды электромагнитных волн, включая и световые, не распространяются в воде (вследствие её электропроводности) на сколько-нибудь значительном расстоянии, и звук поэтому является единственным возможным средством связи под водой. Для этих целей пользуются как звуковыми частотами от 300 до 10000 гц , так и ультразвуками от 10000 гц и выше. В качестве излучателей и приёмников в звуковой области используются электродинамические и пьезоэлектрические излучатели и гидрофоны , а в ультразвуковой — пьезоэлектрические и магнитострикционные. Из наиболее существенных применений Г. следует отметить эхолот , гидролокаторы , которыми пользуются для решения военных задач (поиски подводных лодок противника, бесперископная торпедная атака и т.д.); для мореходных целей (плавание вблизи скал, рифов и др.), рыбопромысловой разведки, поисковых работ и т.д. Пассивным средством подводного наблюдения служит шумопеленгатор , позволяющий определить направление источника шума, например корабельного винта. Подводные мины снабжаются т. н. акустическими замыкателями (взрывателями), вызывающими взрыв заряда мины в момент прохождения над ней корабля. Самодвижущиеся торпеды могут самонаправляться на корабль по его шуму и т.д.
Лит.: Физические основы подводной акустики, пер. с англ., под ред. В. И. Мясищева, М., 1955; Бреховских Л. М., Волны в слоистых средах, М., 1957; Подводная акустика, пер. с англ., под ред. Л. М. Бреховских, т. 1, М., 1965, т. 2, М., 1970: Сташкевич А. П., Акустика моря, Л., 1966: Толстой И., Клей К. С., Акустика океана, пер. с англ., М., 1969.
Л. Д. Розенберг. Р. Ф. Швачко.
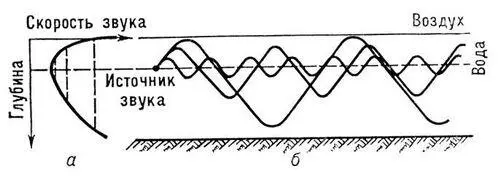
Рис. 2. Распространение звука в подводном звуковом канале: а — изменение скорости звука с глубиной; б — ход лучей в звуковом канале.
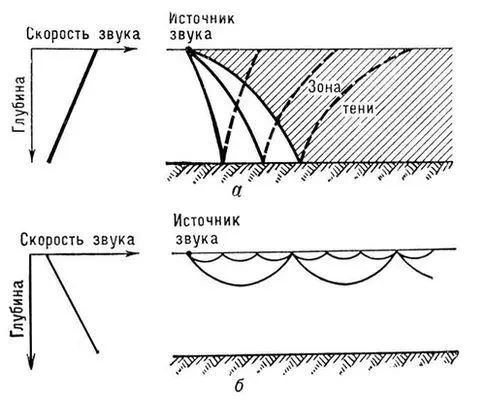
Рис. 1. Рефракция звука в воде: а — летом; б — зимой; слева — изменение скорости с глубиной.
Гидроакустическая станция
Гидроакусти'ческая ста'нция, совокупность схемно и конструктивно связанных акустических, электрических и электронных приборов и устройств, с помощью которых производится приём или излучение либо приём и излучение акустических колебаний в воде.
Различают Г. с. только принимающие акустическую энергию (пассивного действия) и приёмоизлучающие (активного действия). Г. с. пассивного действия [ шумопеленгатор ( рис. 1 , а), Г. с. разведки, звукометрическая станция и др.] служат для обнаружения и определения направления (пеленга) на шумящий объект (движущийся корабль, Г. с. активного действия и др.) по создаваемым объектом акустическим сигналам (шумам), а также для прослушивания, анализа и классификации принятых сигналов. Пассивные Г. с. обладают скрытностью действия: их работу нельзя обнаружить. Г. с. активного действия [ гидролокатор ( рис. 1 , б), рыболокатор, эхолот и др.] применяют для обнаружения, определения направления и расстояния до объекта, полностью или частично погруженного в воду (подводной лодки, надводного корабля, айсберга, косяка рыбы, морского дна и т.д.). Достигается это посылкой кратковременных акустических импульсных сигналов в определённом или во всех направлениях и приёмом (во время паузы между посылками их) после отражения от объекта. Активные Г. с. способны обнаруживать как шумящие, так и не шумящие объекты, движущиеся и неподвижные, но могут быть обнаружены и запеленгованы по излучению, что является некоторым их недостатком. К активным Г. с. также относят станции звукоподводной связи , гидроакустические маяки , гидроакустические лаги , эхолёдомеры и др. акустические станции и приборы. Подробнее о методах пеленгования и определения местоположения см. в ст. Гидроакустика и Гидролокация .
Читать дальшеИнтервал:
Закладка: