БСЭ БСЭ - Большая Советская Энциклопедия (СЛ)

- Название:Большая Советская Энциклопедия (СЛ)
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
БСЭ БСЭ - Большая Советская Энциклопедия (СЛ) краткое содержание
Большая Советская Энциклопедия (СЛ) - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Пример С. с. — система отработки на выходном валу ( рис. 2 ) произвольно задаваемого на входе угла поворота q 1( t ) .
Рассогласование e = q 1( t )— q 2вырабатывается соединёнными по трансформаторной схеме сельсинами— датчиком и приёмником (последний связан с выходным валом). Исполнительным устройством является система «генератор-двигатель» с редуктором; возмущающее воздействие — изменение нагрузки на выходном валу.
По принципу С. с. работают системы наведения ( рис. 3 ) . В С. с. антенны радиолокационной станции рассогласованием служит угловая ошибка между радиолокационным лучом и направлением на цель; исполнительное устройство — электропривод антенны. Автопилот наводимой ракеты также работает по принципу С. с., причём для него рассогласованием служит отклонение ракеты от направления луча, а исполнительным устройством являются рулевая машинка и рули. По принципу С. с. работают многие системы телеуправления и самонаведения. С. с. являются также измерительные приборы, работающие по компенсационному принципу; в них рассогласованием служит разность между показанием прибора и входной измеряемой величиной (см. Компенсатор автоматический ) . По принципу С. с. работают некоторые вычислительные устройства. С. с., выходной величиной которых является механическое перемещение, называемое следящим приводом (см., например, Следящий электропривод ) . Примеры С. с. можно обнаружить и в живых организмах.
Расчёт С. с. при её проектировании в целом основан на теории автоматического регулирования и управления. С. с. могут иметь непрерывное управление (линейное, нелинейное) или дискретное (релейное, импульсное, цифровое), что отражается на выборе метода динамического расчёта. Кроме того, производится технический расчёт каждого блока и элемента. Одна из главных целей динамического расчёта С. с. — синтез корректирующих устройств исходя из заданных требований к качеству процесса управления.
Лит.: Проектирование и расчет следящих систем, Л., 1964; Кочетков В. Т., Половко А. М., Пономарев В. М., Теория систем телеуправления и самонаведения ракет, М., 1964; Воронов А. А., Основы теории автоматического управления, ч. 1—3, М. — Л., 1965—70; Бесекерский В. А., Попов Е. П., Теория систем автоматического регулирования, 3 изд., М., 1975.
Е. П. Попов.
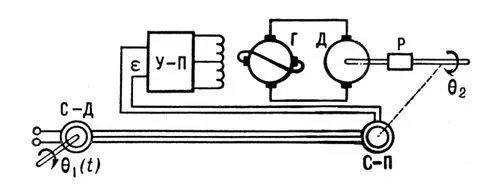
Рис. 2. Схема следящей системы для отработки на выходном валу угла поворота входного вала: q 1(t) и q 2— углы поворота входного и выходного валов; С — Д — сельсин-датчик; С — П — сельсин-приемник; e — сигнал рассогласования; У — П — усилитель-преобразователь; Г — генератор; Д — двигатель; Р — редуктор.
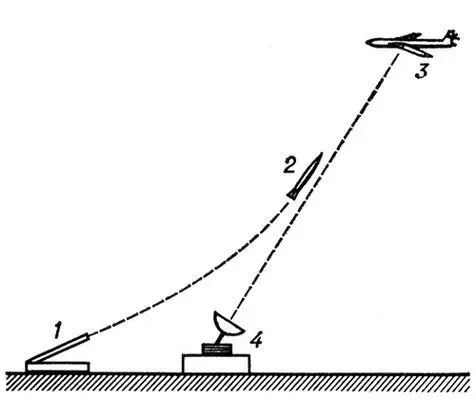
Рис. 3. Схема системы наведения ракеты: 1 — стартовая установка; 2 — ракета; 3 — цель; 4 — радиолокационная станция.
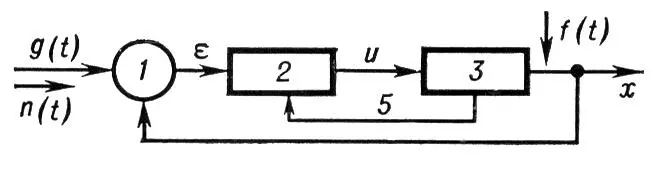
Рис. 1. Блок-схема следящей системы: g(t) — заданная входная величина; n(t) — помехи; e — сигнал рассогласования; u — сигнал управления; f(t) — возмущающее действие; x — выходная величина; 1 — сравнивающее устройство; 2 — усилитель-преобразователь; 3 — исполнительное устройство; 4 — цепь главной обратной связи; 5 — цепь вспомогательной (местной) обратной связи.
Следящий электропривод
Следя'щий электропри'во'д, следящая система, обеспечивающая воспроизведение некоторых механических перемещений на управляемом объекте посредством исполнительного электродвигателя (ИЭ). С. э. включает в себя задающее устройство, измерительный преобразователь, орган сравнения, усилитель и ИЭ. Задающее устройство вырабатывает исходный сигнал (изменяющийся, как правило, по произвольному закону). Измерительный преобразователь непрерывно измеряет фактическое значение воспроизводимой величины на управляемом объекте, которое при помощи органа сравнения сопоставляется с заданным. Обычно измерительный преобразователь и орган сравнения объединены в одном устройстве, вырабатывающем электрический сигнал рассогласования (СР), пропорциональный разности между заданным и фактическими значениями воспроизводимой величины. СР (в виде напряжения или тока) поступает на вход усилителя, а затем на ИЭ, осуществляющий такое движение управляемого объекта, при котором СР уменьшается. В отсутствие СР ротор электродвигателя находится в покое.
Различают С. э. с непрерывным и дискретным управлением. Особенностью первого является непрерывное регулирование напряжения (мощности) ИЭ в функции СР. В простейшем случае эта зависимость линейна. С. э. с дискретным управлением подразделяются на релейные и импульсные. В релейных С. э. в качестве усилителя используют бесконтактные реле, которые при определённой величине СР включают ИЭ на полную мощность. В импульсных С. э. включение ИЭ осуществляется периодически, через определённые (равные) промежутки времени управляющими импульсами тока, амплитуда, длительность или частота которых являются функцией СР.
В большинстве С. э. задаваемой величиной является угол поворота входного вала, а регулируемой — угол поворота выходного вала, с которым связан управляемый объект. В качестве измерительных преобразователей наибольшее распространение в таких устройствах получили потенциометры и индукционные машины переменного тока типа сельсинов или поворотных трансформаторов. С. э. находят применение в различных системах управления, передачи информации и измерения.
Лит.: Электропривод систем управления летательных аппаратов, М., 1973; Основы автоматизированного электропривода, М., 1974.
Ю. А. Хохлов.
Слежявичюс Николае
Слежя'вичюсНиколае (21.2.1882, деревня Дрембляй, ныне Расейнского района, — 11.11.1939, Каунас), литовский буржуазный государственный деятель, адвокат. Окончил юридический факультет Новороссийского университета в Одессе (1907). С 1907 член литовской демократической партии. В 1907—13 редактор ряда буржуазно-либеральных периодических изданий. В 1915 с оккупацией Литвы германскими войсками эвакуировался в Россию. С 1917 член партии ляудининков — демократов. После возвращения на родину с декабря 1918 по март 1919 и с апреля по октябрь 1919 премьер-министр Литвы; один из организаторов борьбы литовской контрреволюции против Советской власти, установленной на большей части территории Литвы; содействовал подавлению революционного движения и укреплению диктатуры литовской буржуазии. В 1926 вновь премьер-министр, министр иностранных дел и юстиции; подписал договор о взаимном ненападении и нейтралитете между Литвой и СССР. В 1922—36 председатель партии ляудининков; придерживался политики сотрудничества с фашистским правительством А. Сметоны.
Читать дальшеИнтервал:
Закладка: