Изот Литинецкий - Беседы о бионике

- Название:Беседы о бионике
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:1968
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Изот Литинецкий - Беседы о бионике краткое содержание
Беседы о бионике - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
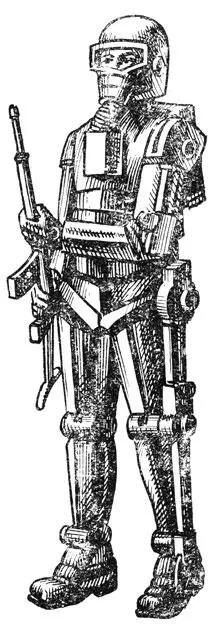
Рис. 2. Проект разработанного в США костюма 'атомного пехотинца' — 'сервосолдата'
Судя по результатам многочисленных экспериментов, использование кожно-вибрационных и электрокожных раздражений в искусственных системах обратной связи оказывается, по-видимому, наиболее перспективным, ибо получение таких раздражений не представляет труда. Однако для уточнения параметров сигналов, а также конструкции воздействующих элементов необходимо провести еще множество экспериментов, большую научно-исследовательскую работу. И она ведется, ведется успешно. Бионики и инженеры, биологи и врачи надеются, что в будущем удастся создать такой биоэлектрический протез, который сможет чувствовать температуру, твердость и качество поверхности удерживаемого предмета. Тогда можно будет действовать искусственной рукой, как естественной, не глядя на нее. Она будет четко различать горячее и холодное, влажное и сухое, гладкое и шероховатое.
Такие искусственные руки могут быть полезны не только инвалидам, лишенным одной или обеих рук, но и совершенно здоровым людям. Ничто не мешает, например, использовать искусственную руку в качестве третьей, четвертой, пятой и шестой руки, если этого требует выполняемая работа. "Дополнительные руки", подсоединенные "в параллель" с живыми и управляемые биотоками, будут дружно помогать человеку, сделают его многоруким. Несмотря на слабость биотоков, искусственную руку можно наделить богатырской силой. Недавно в одной из лабораторий США создали сверхмощного робота высотой свыше 5 м, так сказать "Голем XX века,". Все движения этого великана управляются биоэлектрическими импульсами человека, помещенного внутри него. Человек делает движение, нужное для того, чтобы выдернуть, скажем, кол из земли, — и робот спокойно выдергивает дерево с корнем. "Мы хотели в этом агрегате воплотить все функции человека, умноженные на мощь механизмов", — заявил один из его конструкторов. А теперь посмотрите на рис. 2. Перед вами одна из последних новинок Пентагона — костюм, который, по мнению военных специалистов США, наиболее подходит для пехотинца, действующего в условиях термоядерной войны. Солдат похож на робота: тяжелый шлем, массивный панцирь, мощная броня, стальные башмаки. Трудно сказать, сколько весит этот "наряд", но человек, которого апологеты мировой войны решили облачить в такой броневой скафандр, несомненно, должен обладать сверхпрочным черепом, шеей и руками гориллы. А как же будет передвигаться это бронированное чудовище? Как сможет солдат в таком костюме вести бой, стрелять, драться в рукопашной схватке, преодолевать препятствия? Ведь часто исход боя, как известно, решают доли секунды...
Ответ на все эти вопросы должна дать одна из крупнейших американских фирм, занимающаяся по заданию Пентагона созданием "солдат-роботов". По замыслу военных деятелей США, бронированный скафандр должен приводиться в движение электромоторами, на которые будут воздействовать биоимпульсы мозга "атомного пехотинца". Такой "сервосолдат", по мнению представителей Пентагона, легко сможет один нести тяжелое снаряжение и передвигаться бегом гораздо быстрее, чем обычные люди. Атомный пехотинец сможет также приводить в движение и летательные аппараты на мышечной энергии.
Особенно большой интерес к биоэлектрическим системам проявляют ныне специалисты, занимающиеся решением проблемы жизнедеятельности человека в космосе. Как известно, связующим звеном между человеком и машиной служит система управления космическим кораблем. Эта система — средство интеграции возможностей человека с его способностями. Между тем во время космического полета человек подвергается воздействию больших перегрузок. Так, при взлете и посадке его тело приобретает тяжесть свинца. В этих условиях довольно затруднительно пользоваться ручным управлением, так как приходится преодолевать дополнительный вес рук, возникающий вследствие перегрузок. Одна из американских фирм провела успешные эксперименты по управлению "механической" рукой с помощью биотоков. На руку космонавта надевается специальная "перчатка", которая приводится в действие области и т. д. Между тем в системе "человек — машина" так же широко и эффективно можно использовать и биотоки других мышц человека, например лицевых.
Простите, может сказать человек, я не совсем понимаю, как это будет выглядеть на практике? Да и зачем вообще надо "впрягать" мышцы лица в систему "человек — машина"? Чтобы развеять всякие сомнения на сей счет и убедиться в целесообразности такой постановки задачи, рассмотрим работу такой широко распространенной системы, как "человек — автомобиль".
Общеизвестно, что скорости современных автомобилей непрерывно увеличиваются, тогда как скорость реакции людей, сидящих за рулем, остается неизменной; она одинакова при скорости 100, 200, 300 и более километров в час. Данные статистики показывают, что большая часть автомобильных катастроф происходит из-за недостаточно быстрой реакции водителей — они не успевают вовремя затормозить, и в результате — несчастный случай. Вследствие запоздалой реакции шоферов в моменты так называемых "критических ситуаций" только в Японии за 1966 г. под колесами автомобилей погибло более 10 000 человек, а сотни тысяч получили ранения. Как же быть? Ездить медленнее? Снижать скорость автомобилей? Это невозможно. Все идет, напротив, к увеличению скорости. А нельзя ли свести до минимума запаздывание реакции шофера?
Время, которое проходит с момента решения тормозить и до собственно торможения — время реакции, можно разбить на три периода:
1) время, требуемое для передачи нервных импульсов с коры головного мозга на нервные окончания мышц ноги (при скорости импульсов 100 м/сек оно равно примерно 0,15 сек);
2) время, требуемое для перемещения ноги с педали акселератора на педаль тормоза;
3) время, требуемое для нажатия на рычаг тормоза (и остановки автомобиля).
Суммарная продолжительность всех трех перечисленных периодов, как показали исследования, в среднем составляет 0,4 — 0,5 сек. За это время при скорости 100 км/час машина проходит приблизительно 13,6 м. При такой скорости между моментом восприятия мозгом опасной ситуации и моментом торможения, т. е. за 0,5 сек, шофер может сбить неожиданно появившегося на шоссе человека или свалить машину в кювет, если не дастся объехать вдруг возникшее препятствие.
Таким образом, задача заключается в том, чтобы сократить промежуток времени между поступлением импульсов в головной мозг, их трансформацией в командные сигналы и обратным поступлением к исполнительному органу для выполнения необходимых движений. Поскольку скорость передачи нервного импульса мы увеличить не можем, остается одно: резко уменьшить проходимый им путь по цепи управления, состоящей (в общем случае ручного или ножного управления) из следующих звеньев: глаз → нервный канал → двигательный центр коры головного мозга → нервный канал → мышца → конечность → исполнительный орган → объект. Очевидно, наибольшего эффекта можно добиться, исключив из этой цепи некоторые наиболее инерционные и ненадежные звенья. Такими звеньями в нашем примере являются нога и мышца ноги. Их можно исключить из цепи управления либо использовав в качестве управляющего сигнала не биопотенциал мышцы конечности, а сигналы-команды, поступающие к ней от мозга, либо возложив функции передачи приказа от головного мозга прямо на тормоз на какую-нибудь мышцу, расположенную в непосредственной близости от мозговых центров и обладающую малой массой (чем меньше масса мышцы, тем быстрее она срабатывает). Всем последним условиям как нельзя лучше удовлетворяют мышцы бровей. Их и решил использовать в недавно созданной опытной модели вспомогательной тормозной системы сотрудник Люблянского университета инженер Водовник.
Читать дальшеИнтервал:
Закладка: