Иван Хорбенко - Звуки в морских глубинах

- Название:Звуки в морских глубинах
- Автор:
- Жанр:
- Издательство:Воениздат
- Год:1962
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Иван Хорбенко - Звуки в морских глубинах краткое содержание
Но есть еще и на нашей «обжитой» планете Земля много неизученных «белых пятен», среди них почти неизвестный на всю его глубину Мировой океан с его подводными горами и впадинами, со своим растительным и животным миром, со своими физическими законами. В изучении его большую пользу приносит гидроакустика — сравнительно молодая наука, имеющая большое будущее.
Эта наука имеет большое прикладное значение. Современные подводные корабли не могут обойтись без гидроакустических приборов, которые являются «ушами» и «глазами» подводных лодок. Гидроакустические приборы необходимы также и для мореплавания и рыболовства.
О том, что такое гидроакустика, как устроены гидроакустические приборы и как гидроакустика служит нам в мирных и военных целях, рассказывает автор в этой книге.
Звуки в морских глубинах - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Электронно-лучевая трубка служит для определения направления на цель фазовым методом, который основан на уравнивании разности сигналов двух приемников или двух групп приемников акустической базы.
При фазовом методе пеленгования применяется двухканальный компенсатор, который делит приемники акустической системы, участвующие в пеленговании, на две группы — левую и правую. С выходов двухканального компенсатора сигналы подаются на входы тоже двухканального усилителя, где они преобразуются и усиливаются, а затем подаются на отклоняющие пластины электронно-лучевой трубки.
При фазовом методе пеленгования оператор добивается, чтобы линия на электронно-лучевой трубке была расположена строго вертикально. В этот момент стрелка компенсатора укажет направление на цель.
Кроме указанных методов, есть еще третий метод — фазово-амплитудный, который также основан на использовании электронно-лучевой трубки. Если ось акустической системы совпадает с направлением на цель, изображение линии будет расположено в центре трубки, а если не совпадает, то изображение линии будет иметь выбросы влево или вправо.
Измерение времени с момента посылки до возвращения отраженного сигнала позволяет определить расстояние до цели с учетом того, что общее время нужно разделить пополам, так как сигнал проходит двойное расстояние — до цели и обратно.
А как же определить в этом случае направление на цель? Мы уже упоминали о том, что ультразвук излучается направленно, что позволяет определить направление на цель с большой точностью. Некоторые современные гидролокаторы определяют также и глубину подводной лодки.
По устройству гидролокационная станция значительно сложнее шумопеленгаторной и состоит из большего числа приборов. В нее входят: преобразователь, подъемно-опускное и поворотное устройства, генератор, реле приема — передачи, усилитель, рекордер, автомат посылок, пульт управления и индикаторные приборы (рис. 31).
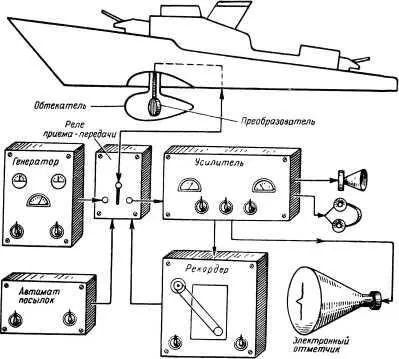
Рис. 31. Схема гидролокационной станции .
Гидроакустический преобразователь служит для излучения ультразвуковых волн и приема отраженных от цели эхосигналов. Ультразвуковые волны излучаются преобразователем короткими посылками. После каждой посылки наступает пауза, во время которой преобразователь становится приемником. Таким образом, преобразователь обладает обратимым свойством, одну часть времени он выполняет функции излучателя, а другую, большую часть времени, — функции приемника.
Действие преобразователей основано на использовании ранее разобранных прямого и обратного магнитострикционного и пьезоэлектрического эффектов.
Зоркий подводный глаз
Таким образом, шумопеленгаторные станции работают на принципе так называемой пассивной акустики, т. е. на прослушивании шумов и определении направлений на них. А если интересующий нас подводный предмет не издает никаких шумов, как обнаружить его?
Шумопеленгаторы не могут полностью обеспечить действия надводных кораблей по борьбе с подводными лодками и по другой причине. Чтобы атаковать подводную лодку, нужно не только обнаружить, но и точно определить ее местонахождение, расстояние до нее. Эту задачу выполняют гидролокационные станции, работающие по принципу излучения и приема отраженных от цели ультразвуковых волн.
Гидроакустические преобразователи могут быть кругового и направленного действия. Первые применяются для обнаружения подводных объектов, вторые — для определения направления, расстояния и глубины.
Преобразователь размещается под днищем надводного корабля, ближе к носовой части. Чтобы уменьшить помехи от завихрений воды во время хода корабля, вибратор помещают в металлический обтекатель яйцевидной формы (рис. 32, а). Толщина стенок обтекателя такова, что они не препятствуют прохождению ультразвуковых волн.
В последние годы в США делают обтекатели из пластических масс, обладающих большой прочностью и хорошей звукопроводимостью.
При работе гидролокатора обтекатель опускается ниже киля, а после окончания работы поднимается вверх в специальный отсек так, чтобы он не выступал ниже днища.
Опускается и поднимается обтекатель подъемно-опускным устройством, состоящим из электродвигателя, редуктора и пульта управления.
На некоторых проектах надводных кораблей зарубежных флотов обтекатели закреплены постоянно в носовой части в виде овальных выпуклостей. В этом случае в подъемно-опускном устройстве нет необходимости (рис. 32, 6 ).

Рис. 32. Обтекатель: а — опускающийся при работе; б — закрепленный неподвижно.
Для вращения преобразователя служит поворотное устройство, состоящее из электродвигателя с редуктором. Управление поворотным устройством дистанционное с пульта управления.
Генератор собран на специальных генераторных лампах большой мощности, аноды, сетки и накалы которых питаются от специального преобразователя (агрегата).
Генератор вырабатывает электрические колебания определенной частоты, которые поступают на преобразователь и излучаются в водную среду уже в виде акустических колебаний.
Реле приема — передачи представляет собой электромагнитное реле с несколькими группами контактов. Реле приема — передачи при посылке ультразвукового сигнала подключает генератор к преобразователю (рис. 33, a ), a при приеме отраженного эха — преобразователь к усилителю (рис. 33, 6 ).

Рис. 33. Принцип работы реле приема — передачи: а — при излучении; б — при приеме.
Усилитель служит для усиления и преобразования очень слабых электрических сигналов, поступающих от преобразователя. Усилитель состоит из нескольких каскадов и собран на усилительных лампах. Один из каскадов представляет собой гетеродин (маломощный генератор), при помощи которого ультразвуковая частота преобразуется в звуковую. С выхода усилителя сигналы поступают на рекордер и индикаторные приборы (телефоны, громкоговоритель, электронный отметчик).
Рекордер служит для графического воспроизведения отраженных сигналов, измерения расстояния до целей, определения относительной скорости сближения с целью и выработки данных для атаки подводной лодки. Кроме того, рекордер управляет работой реле приема — передачи, а следовательно, посылками ультразвуковых сигналов.
Читать дальшеИнтервал:
Закладка: