Техника и вооружение 1999 05-06

- Название:Техника и вооружение 1999 05-06
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:1999
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Техника и вооружение 1999 05-06 краткое содержание
Номер посвящен зенитным ракетным комплексам ПВО сухопутных войск.
Прим. – с таблицами.
Техника и вооружение 1999 05-06 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Аппаратура РЛС была размещена на гусеничном самоходе "объект 32". Масса станции – 44 т. Расчет – 4 человека.
Станция наведения 9С32 комплекса С-300В и ее схема
Многоканальная станция наведения ракет 9С32 предназначалась для:
– поиска, обнаружения, захвата автосопровождения аэродинамических целей и БР по данным целеуказания с КП системы и автономного (БР – только по данным ЦУ с КП)
– выработки и передачи на пустые установки координат и производных координат целей для наведения станций подсвета целей, находящихся на этих установках, а также ЗУР, запускаемых с ПУ и пускозаряжающих установок, на обстреливаемые цели;
– управления огневыми средствами (ПУ и пускозаряжающими установками) как централизованно (от КП системы), так и автономно.
Многоканальная станция наведения ракет была способна одновременно производить секторный поиск целей (по данным ЦУ или автономно) и сопровождать до 12 целей, одновременно управлять работой всех ПУ и пускозаряжающих установок ЗРК, передавая на них информацию, необходимую для пуска и наведена 12 ЗУР по 6 целям. Станция одновременно регулярно осуществляла просмотр приземной кромки, в которой могли появиться низколетящие цели.
Станция представляла собой координатную многоканальную по целям и ЗУР когерентно-импульсную РЛС сантиметрового диапазона с высоким энергетическим потенциалом, электронным сканированием луча в двух плоскостях, обеспечиваемым за счет использования в станции ФАР и системы управления лучом на базе специальной ЭВМ.
В станции использовались моноимпульсный метод пеленгации и дальнометрии целей и различные типы зондирующих сигналов, обеспечивавшие определение координат целей и их производных с высокими точностью и разрешающей способностью. В станции использовалась цифровая обработка сигналов во всех режимах работы.
В многоканальной станции наведения ракет были предусмотрены два режима боевой работы – по данным ЦУ от КП и автономная работа. В первом режиме станция производила поиск целей в секторе 5° по азимуту и 6° по углу места. Во втором режиме она производила обор сектора ±30° по азимуту (относительно биссектрисы указанного сектора ответственности) и от 0° до 18° по углу места. Азимут (биссектриса) сектора ответственности устанавливалась путем вращения ФАР в пределах ±340°.
В станции использовались два типа зондирующих сигналов. Квазинепрерывный сигнал (импульсные пачки с большой дискретностью) – немодулированный и с линейной частотной модуляцией в пачке, применялся при поиске целей по данным ЦУ, а также для обзора сектора автономного поиска и автосопровождения целей. Импульсный сигнал с линейной частотной модуляцией применялся только при поиске в автономном режиме.
Обработка принятых сигналов производилась квазиоптимальными фильтрами. Формирование и обработка сигнала с внутриимпульсной линейной частотной модуляцией осуществлялась на дисперсионных линиях задержки с высоким коэффициентом сжатия. Обработка квазинепрерывного сигнала производилась коррелляционно-фильтровым методом с интегрированием на промежуточной частоте принятых сигналов с помощью узкополосных фильтров.
Управление системами многоканальной станции наведения ракет в процессе поиска, обнаружения и автосопровождения целей осуществлялось специальной ЭВМ. При автосопровождении сигналы ошибок поступали в следящую координатную систему, которая выдавала в ЭВМ оценки во времени координат и их производных. ЭВМ по этим данным замыкала контур сопровождения, выдавая управляющие коды (сигналы) на синхронизатор, систему управления лучом и другие системы станции. Неоднозначность определения дальности и скорости при поиске квазинепрерывным сигналом устранялась в режиме автосопровождения с помощью производных дальности.
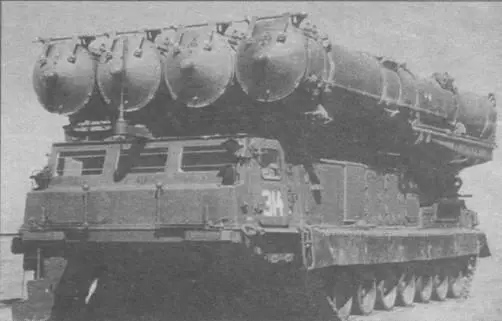
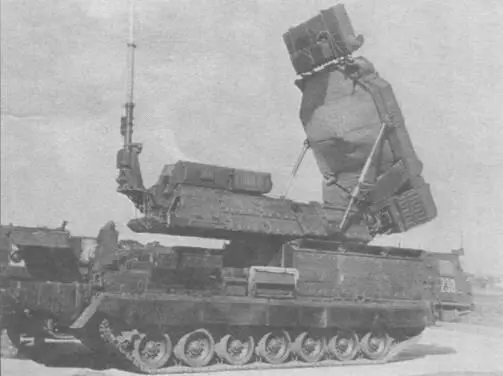
На двух снимках пусковая установка 9А83 комплекса С-300В в походном (вверху), боевом положении (справа)
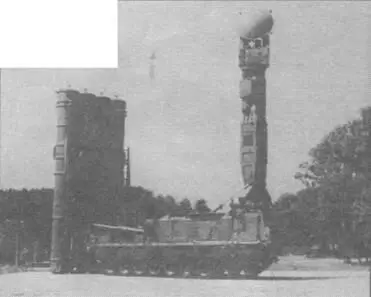
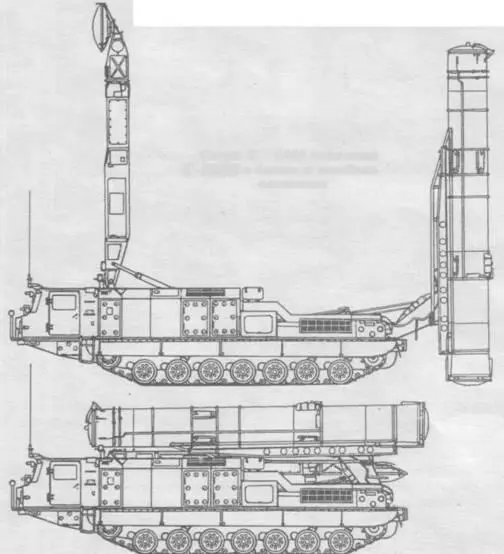
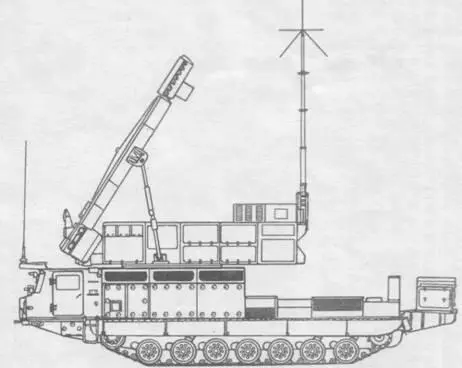
Схема ПУ 9Л83 комплекса С-300В в боевом и походном положениях
Многоканальная станция наведения ракет при работе в режиме ЦУ обеспечивала обнаружение истребителей на высотах более 5 км на дальностях 150 км, БР типа "Скад" – 90 км, "Ланс"- 60 км, головной части "Першинг" – 140 км, авиационных БР типа SRAM – 80 км. От момента обнаружения до момента перехода на автосопровождение цели с однозначным определением параметров ее движения проходило от 5 секунд ("Першинг" и SRAM) до 11 секунд (цель – истребитель). При работе в автономном режиме многоканальная станция наведения ракет обеспечивала обнаружение самолетов-истребителей на дальностях до 140 км.
Среднеквадратические ошибки определения дальности, скорости и угловых координат целей при их автосопровождении составляли для истребителя 5-25 м по дальности, 0,3- 1,5 м/с – по скорости, 0,2-2 д.у. по азимуту и углу места. Для головной части ракеты "Першинг"- 4-90 м – по дальности, 1,5-35 м/с – по скорости, 0,5-1 д.у. по азимуту и углу места. Разрешающая способность составляла 100 м по дальности, 1° по азимуту и по углу места, 5 м/с по скорости.
В состав многоканальной станции наведения ракет входили:
– антенная система на основе пассивной ФАР с фазовым управлением лучом шириной около 1°, работавшая "на просвет" при облучении ее рупорным излучателем передатчика и приеме отраженных сигналов тем же коммутируемым рупором;
– передающая система на основе цепочки клистронов, развивавшая среднюю мощность 10-13 кВт (импульсную – 150 кВт);
– приемная система с усилителями на высокой частоте, обеспечивавшими очень высокую чувствительность – до 10 -17Вт;
– система управления лучом;
– две специальных ЭВМ;
– устройство первичной обработки сигналов;
– система индикации;
– система управления основной антенной и антеннами квадратурных автокомпенсаторов помех;
– следящая координатная система;
– система управления и сигнализации;
– система телекодовой связи с КП системы и пусковыми установками:
– система навигации, топопривязки и ориентирования;
– система автономного электроснабжения на базе газотурбинного генератора:
Читать дальшеИнтервал:
Закладка: