Александр Фролов - Новые космические технологии

- Название:Новые космические технологии
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Александр Фролов - Новые космические технологии краткое содержание
В книге представлены различные способы создания движения тел, то есть, изменения положения объекта как в пространстве, так и во времени. Рассматриваются принципы работы активных движителей, не требующих реактивного отброса массы за пределы транспортного средства. Показаны способы создания хрональной движущей силы, обеспечивающей ускорение или замедление движения во времени, то есть, изменения скорости существования частиц материи. Впервые показан расчет резонансных условий для четырехмерных процессов,
Книга предназначена для инженерно-технических специалистов и широкого круга читателей, интересующихся вопросами конструирования аэрокосмических движителей для транспортных средств нового типа. Конструктивные сведения даются читателю для экспериментальной проверки, поскольку исходная информация по данной теме, в некоторых случаях, не имеет официального достоверного подтверждения.
Опубликованные материалы взяты из открытых источников, или присланы авторами.
Ваши комментарии и дополнения присылайте автору.
Новые космические технологии - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Более всего, нас интересует гипотетическая ситуация, показанная в правой части рис. 28. При данной траектории движения «внутреннего рабочего тела», на данное тело должна действовать вертикальная составляющая некой силы, компенсирующей его вес. На корпус устройства (полусферу), в данном случае, будет действовать реактивная сила, направленная вверх.
Представляется возможным создать движитель, использующий данный принцип. При конструировании, необходимо учесть силы трения в точке соприкосновения внутренней поверхности сферы и движущейся рабочей инерциальной массы.
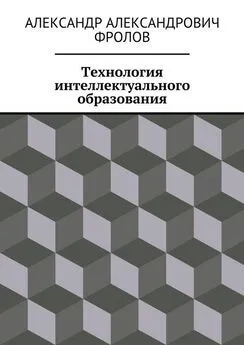
Рассмотрим еще несколько теоретических моделей. На рис. 29 показана схема импульсного движителя, в котором используется два или более вращающихся грузов. Вдоль оси вращения расположен электромагнит, периодически втягивающий сердечник. Поскольку вращающиеся грузы и сердечник связаны гибкой тягой, то движение сердечника вниз происходит с усилием, так как необходимо перевести вращающиеся грузы с орбиты большего радиуса на орбиту меньшего радиуса.
Рис. 29. Импульсный движитель ФроловаВзаимодействие сердечника и катушки электромагнита происходит в соответствии с законом сохранения импульса, поэтому усилие на перемещение сердечника электромагнита передается корпусу, который получает реактивный импульс тяги вверх. Возврат грузов на орбиту большего радиуса происходит без усилий, если электромагнит выключен. Таким образом, данное устройство способно «рывками» подтягиваться вверх. Полагаю, что экспериментальная проверка данной концепции покажет хорошие перспективы внедрения данной технологии в аэрокосмической технике.
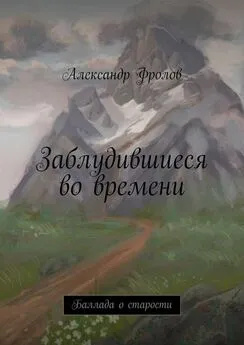
Еще одна идея использования центробежной силы, сжимающей пружину, показана на рис. 30.
Рис. 30. Пара грузов на плоских цепяхГрузы соединены с осью вращения плоскими цепями, не передающими осевое усилие. Без вращения, грузы лежат на дне корпуса, а пружина расслаблена. При вращении оси, например, электроприводом, грузы приходят в движение, поскольку плоские цепи передают крутящий момент. При определенной скорости вращения, грузы выходят на орбиту наибольшего радиуса, натягивая плоскую цепь, которая их соединяет. Натяжение цепи приводит к сжатию пружины, которая упирается в корпус.
Теоретически, предполагается, что корпус получит импульс, в процессе сжатия пружины. После ее сжатия, на корпус оказывается только постоянное давление. Упругое сжатие пружины обеспечивается центробежными силами. Аналогично предыдущему варианту конструкции, можно организовать импульсный режим работы, например, за счет периодического изменения скорости вращения грузов, или другим способом. Грузов в схеме, показанной на рис. 30, может быть несколько.
Можно предложить еще много теоретических моделей, основанных на похожих принципах, но теория без практики не имеет коммерческого смысла. Предлагаемые конструкции несложные, дешевые по себестоимости для любой мощности привода, интересно было бы их проверить экспериментально.
Перейдем к примерам известных реальных движителей, уже проверенных на практике, в которых используются инерциальные эффекты.Глава 8 Инерциоиды
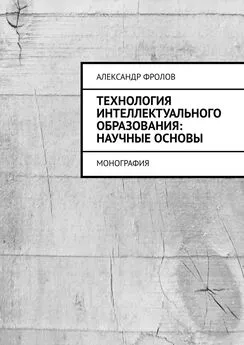
Мы уже начали рассматривать конструкции механических устройств, движущая сила в которых обусловлена применением свойства инерциальности частиц материи, то есть, их связи с эфиром. Данный тип движителей называется «инерциоиды», термин придумал инженер В.Н. Толчин, в 1936 году [13]. На фотографии рис. 31 показан один из инерциоидов Толчина. Принцип действия очень простой: два грузика вращаются синхронно, в разных направлениях, что компенсирует крутящий момент.
Рис. 31. Инерциоид Толчина
Каждый из них, на половине траектории, разгоняется приводом, а на второй половине траектории привод выключается, а включается тормозная колодка (пружинный тормоз), вращение тормозится.
Такой режим «мотор – тормоз» позволяет передавать реакцию корпусу устройства во время всего цикла, как при ускорении инерциальных масс, так и при их торможении.
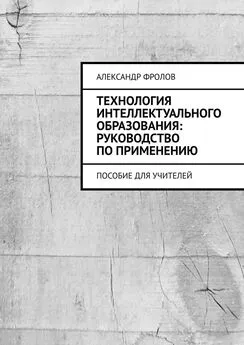
На схеме рис. 32 показаны две фазы работы подобного движителя: разгон эксцентриков приводом, а затем, их свободное движение, которое тормозится.
Рис. 32. Две фазы работы инерциоидаПри разгоне, от точки А до точки В, ускорение положительное, и при свободном движении, от точки В до точки А, ускорение отрицательное (торможение). Реакция корпуса на обе половины цикла направлена в одну сторону, хотя ее величина меняется, в связи с чем, устройство двигается рывками.
Отметим, что в инерциоиде Толчина углы включения мотора или тормоза были равны 30 градусов: от 330 до 0 градусов работал мотор, а от 150 до 180 градусов происходило торможение. В общем случае, фазы ускорения и торможения могут составлять по половине цикла.
В своих работах, А.Е. Акимов и Г.И. Шипов, раскрывают теорию работы инерциоидов с позиций «торсионной механики». Г.И. Шипов приложил много усилий для практического развития данной темы, еще в 1981 году изготовил два инерциоида по схеме Толчина в фирме Туполева, а затем успешно испытал их в МГУ, устанавливая инерциоид для испытаний на «платформу на воздушной подушке» [14].
Интересно, что при попытке Шипова подать заявку на изобретение в 1991 году, он получил отказ, обоснованный тем, что существует некое Постановление, запрещающее российскому патентному бюро принимать к рассмотрению заявки по данной теме. Формулировка «движение системы за счет внутренних сил» может быть изменена только в том случае, если Академия Наук официально признает существование эфира, как реальной среды, имеющей определенные физические свойства.
Тем не менее, экспериментально, эффект Толчина и работоспособность его инерциоида были подтверждены неоднократно, еще в тем времена, когда Шипов работал с Ракетно-Космической Корпорацией «Энергия», а также, в ходе совместных экспериментов с американскими учеными. В 2000 году, Шипов изучал тему инерциоидов в лаборатории, которую специально создали в Таиланде. Наконец, в 2002 году, НИИ Космических систем имени Хруничева начал серьезно заниматься темой инерциальных движителей, о чем говорит факт применения новой системы корректировки орбиты спутника «Юбилейный».
История инерциоидов, судя по старым патентным документам, показывает наличие большого интереса изобретателей к данной теме. Очевидно, что есть спрос на подобную технику. Отчасти, это объясняется тем, что данные устройства довольно примитивны, не требуют электроники, и могли быть успешно реализованы много лет назад. В статье «Свободная энергия», 1996 год, я привел ссылки на десятки патентов по теме «инерциоиды» [15]. В 2003 году, в журнале «Новая энергетика» был дан обзор конструктивных решений инерциоидов, по схемам американских патентов [16]. Более ста схем инерциоидов рассмотрено на популярном интернет сайте www.rexresearch.com/inertial/inertial.htm
Читать дальшеИнтервал:
Закладка: