Вертолёт, 2005 № 02

- Название:Вертолёт, 2005 № 02
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2005
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Вертолёт, 2005 № 02 краткое содержание
Вертолёт, 2005 № 02 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
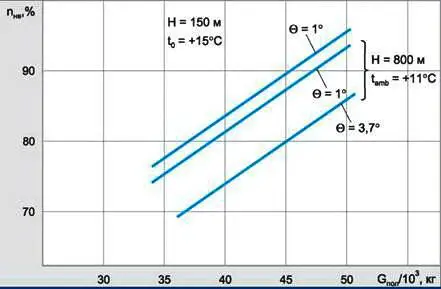
Рис. 3. График зависимости частоты вращения НБ вертолета Ми-26 на скорости авторотации 130–150 км/ч от полетной массы и величины общего шага
Типовая техника пилотирования при одновременном отказе двух двигателей, рекомендованная практически для всех одновинтовых вертолетов, связана с уменьшением общего шага несущего винта до минимального значения с последующим увеличением угла тангажа на кабрирование для уменьшения поступательной скорости.
Теоретические исследования и результаты моделирования показали:
1) падение частоты вращения НВ после отказа двух двигателей при такой технике перехода на авторотацию у вертолета Ми-26 идет более динамично (рис. 1). Маховое движение лопастей при отклонении ручки управления на себя для торможения поступательной скорости увеличивается больше, чем на других вертолетах. Так, в горизонтальном полете на скорости 200 км/ч величина М кр /1 нв для вертолета Ми-26 составляет 1,91 1/рад, а для Ми-6 — 1,1 1/рад, на скорости 270 км/ч эти величины соответственно равны 2,5 и 1,41 1/рад;
2) уменьшение тяги несущего винта по мере уменьшения общего шага при полете с перегрузкой меньше 1 после отказа двигателей вызывает увеличение махового движения лопастей. Это, в свою очередь, требует не только отклонения органов управления для парирования появляющихся разбалансировочных моментов, но и дополнительной коррекции возмущений из-за махового движения лопастей при снижении эффективности управления. Достаточно большие отклонения органов управления на Ми-26 связаны еще и с установкой неуправляемого стабилизатора, что приводит к продольной статической неустойчивости по скорости в горизонтальном полете и на режиме авторотации. Эта особенность подтверждается не только теоретическими расчетами, но и материалами летных испытаний.
При переходе на режим авторотации для сохранения постоянной поступательной скорости необходимо довольно значительное отклонение ручки управления на себя для парирования возникающего пикирующего момента. Так, например, для перехода на режим авторотации на постоянной скорости 170 км/ч автомат перекоса отклоняется на 1,5°, что соответствует отклонению ручки управления на себя примерно на 50 мм. При переходе на авторотацию с созданием положительного тангажа для гашения скорости эти отклонения еще больше увеличиваются.
Для создания угла тангажа 15° на кабрирование требуется отклонение автомата перекоса на 2,5°. При этом маховое движение лопасти увеличивается, и в заднем положении угол взмаха равен -2°, а в переднем положении —20°. На вертолете Ми-6 эти величины соответственно составляют: 0° в заднем положении и -12° в переднем;
3) из-за большей нагрузки на ометаемую площадь увеличивается вертикальная скорость снижения. Процесс снижения происходит быстрее и с большей потерей высоты. Это приводит к тому, что посадка вертолета происходит при большей поступательной скорости, чем на вертолете Ми-6.
С учетом результатов теоретических исследований и летных испытаний для вертолета Ми-26 была рекомендована усовершенствованная техника перехода на режим авторотации. Она заключается (как и при отказе одного двигателя на скоростях полета более 200 км/ч) в первоначальном создании угла тангажа на кабрирование с практически одновременным (или с небольшим запаздыванием до 1 с) уменьшением общего шага несущего винта. Такая техника перехода на режим авторотации увеличивает угол атаки несущего винта, создавая благоприятные условия для его раскрутки.
Уменьшение частоты вращения НВ приводит к незначительному снижению эффективности управления. Маховое движение лопастей хотя и увеличивается, но ненамного, что не требует чрезмерных отклонений органов управления, его запасы, следовательно, остаются приемлемыми. Потеря высоты незначительна.
Исследования, проведенные на других вертолетах, показали, что даже летчик средней квалификации уже через 0,7 с замечает резкое изменение мощности, а у опытных летчиков это время еще меньше. Такую технику перехода на режим самовращения при отказе двух двигателей нетрудно освоить, если следовать основному правилу поддержания частоты вращения НВ. Эти особенности перехода на режим самовращения несущего винта при отказе двух двигателей проявляются при всех значениях полетных масс, но для полетных масс, близких к максимальным, ситуация в первоначальный момент после отказа усугубляется.
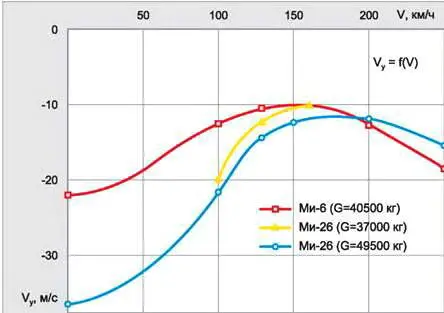
Рис. 4. График зависимости вертикальной скорости снижения на режиме авторотации от скорости полета
В процессе летных испытаний были определены основные характеристики установившегося самовращения во всем диапазоне эксплуатационных полетных масс, которые выявили следующие особенности:
— во-первых, наличие зависимости частоты вращения НВ от полетной массы. Как видно из рис. 3, изменение полетной массы вертолета на 1000 кг приводит к изменению скорости вращения несущего винта на 1 %.
При изменении полетной массы от нормальной до минимальной частота вращения несущего винта снижается почти на 20 %, что приводит к такому же уменьшению эффективности управления, как и в момент отказа двигателей (рис. 1, 2). При минимальной полетной массе потребные отклонения продольного управления увеличиваются почти в полтора раза по сравнению с отклонениями при нормальной полетной массе;
— во-вторых, значительное увеличение вертикальной скорости снижения при поступательных скоростях менее 120 км/ч, что увеличивает крутизну траектории планирования и усложняет условия посадки. Поэтому минимальные скорости планирования выбраны такими, чтобы вертикальные скорости снижения были не более 15–17 м/с при всех значениях эксплуатационных полетных масс. Максимальные скорости на авторотации были приняты равными крейсерским скоростям для каждой полетной массы вертолета. Зависимость V y =i(V пр) для вертолетов Ми-6 и Ми-26 представлена на графике рис. 4.
В полетах по определению зависимости V y =|(V пр) при скоростях менее 100 км/ч из- за больших аэродинамических поправок в показаниях скоростей (при существовавшей тогда компоновке приемников ПВД) было выполнено несколько режимов вертикальной авторотации, скорость снижения на которых достигала -35 м/с. Полет на этих режимах характеризовался очень высокой степенью устойчивости вертолета, особенно в продольном отношении, что требовало больших отклонений ручки управления от себя (более чем на 3/4 хода).
Читать дальшеИнтервал:
Закладка: