Юрий Почанин - Робототехника в промышленности

- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2022
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Юрий Почанин - Робототехника в промышленности краткое содержание
Робототехника в промышленности - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Синхронный двигатель содержит ротор, который синхронно вращается с колеблющимся полем или током. Синхронные приводы имеют множество преимуществ перед другими двигателями. В первую очередь это относится к энергетическим показателям. Их применяют как в позиционном, так и в контурном режимах работы.
Преимущества:
–высокая экономичность;
–удобство сборки и хорошие регулировочные свойства;
–очевидна целесообразность применения синхронного привода для механизмов, не требующих регулирования скорости.
Недостатки:
–применение синхронного двигателя затруднено, если механизмы обладают большими маховыми массами, где необходимо иметь регулируемый или двойной привод;
–не имеет начального пускового момента, следовательно, для его пуска необходимо разогнать ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
Асинхронные двигатели (АД) – имеют ограниченное применение в ПР. Это объясняется сложностью и высокой стоимостью электронных преобразователей, применяемых для регулирования частоты вращения. Тем не менее в ПР грузоподъемностью свыше 40 кг их использование оправдано.
В зависимости от вида напряжения питания и отметки статора различают двух и трехфазные АД. Этот тип двигателя используется в основном для питания ведущих колес автомобиля, поэтому и может найти место в колесной робототехнике. Наличие мощных полупроводников сделало практичным использование более простых асинхронных электродвигателей переменного тока.
Преимущества:
–простота и надежность из-за отсутствия коллектора;
–низкая стоимость;
–значительно низкая масса;
–меньшие габариты.
Недостатки:
–могут перегреваться, особенно под нагрузкой;
–невозможность стабильно держать частоту вращения;
–относительно небольшой пусковой механизм.
Сервопривод. Это тип электромеханических двигателей, которые не вращаются постоянно, как шаговые, а перемещаются по сигналу в определенное положение и сохраняют его до следующего сигнала. В сервоприводах используется механизм обратной связи, позволяющий обрабатывать ошибки и исправлять их в позиционировании. Такая система называется следящей. Если какая-то сила оказывает давление на привод, изменяя его положение, двигатель будет применять силу в противоположном направлении, чтобы исправить возникающую ошибку. Таким образом, достигается высокая точность позиционирования.
Звенья, сочленённые посредством редукторов, приводятся в движение, и удерживаются в определенном положении при помощи сервомоторов (серводвигателей), рис 3.7.

Рис. 3.7. Сервомотор
Сервомоторы являются высокопроизводительными моторами, способными точно контролировать положение и скорость, но не каждый тип сервомотора подойдет для современного промышленного робота, так как есть ряд строгих требований, например, точность перемещения до 0,01мм. Расположение серводвигателей в роботах отмечено красными кружками на рис. 3.8.
Преимущества сервомоторов:
–более высокая скорость вращения;
–высокая мощность;
–позиция механизма всегда на виду и доступна для корректирования.
Недостатки:
–сложная система подключения и управления;
–требует квалифицированного обслуживания;
–высокая стоимость.

Рис. 3.8. Расположение и назначение сервомоторов
Редукторы. Физически функцию сустава (сочленения), соединяющего два соседних звена робота, несут редукторы. Они представляют собой, как правило, законченное механическое устройство, с корпусом в виде составного цилиндра. С одной стороны редуктор крепится к звену N, где установлен мотор, с другой стороны к редуктору крепится корпус звена N+1. Расположение и назначение редукторов показано на рис.3.9.
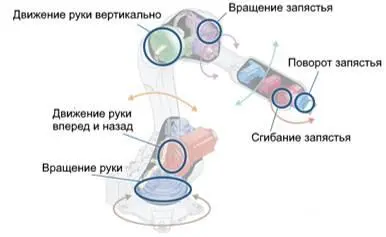
Рис. 3.9. Расположение и назначение редукторов
Редукторы нижних осей (с первой по третью) обычно имеют полую середину для того, чтобы сквозь них можно было провести электрические провода и пневматические трубки для следующих осей и исполнительного органа (инструмента) робота. Однако, основной задачей редуктора является увеличение силы вращения мотора, за счет снижения скорости вращения. Внутри редуктора находится множество механических передач разного рода, устроенных таким образом, чтобы вращение вала двигателя преобразовывалось в более мощное вращение на выходе из редуктора, но с меньшей скоростью. Таким образом, уменьшая вращение мотора в 10 раз, можно достичь десятикратного увеличения мощности привода.
Трансмиссия или передача – является компонентом, который передает крутящий момент, вырабатываемый приводами и редукторами и преобразует его в движение робота. Виды передач, используемых в промышленных роботах, показаны на рис.3.10.
Трансмиссия также способна изменять направление и величину мощности привода. Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов, используя трансмиссионные механизмы, такие как ремни и шестерни. Такая схема применяется в запястье роботов серии R от Kawasaki, что позволило сделать запястье более компактным.

Рис. 3.10. Виды передач
.
Довольно часто манипуляторы имеют встроенные датчики давления, благодаря чему они могут контролировать силу захвата. К примеру, в задачу робота может входить перемещение лампочки с одного места на другое, чтобы проверить работает ли она. Если сила будет высока, то лампочка просто лопнет. Контролирование силы сжатия гарантирует, что лампочка не пострадает. При помощи других конечных эффекторов могут использоваться распылители порошка, различные дрели и так далее.
Устройство управления приводом. Устройство управления приводом может быть непрерывного действия, релейным, импульсным или цифровым.
Обобщенная функциональная схема привода промышленных роботов приведена на рис. 3.11.

Рис. 3.11. Обобщенная функциональная схема привода:
КС – канал связи; ОС – обратная связь
Функциональна схема электропривода. Электропривод современного ПР представляет собой комплекс приводов, каждый из которых управляет отдельной степенью подвижности. Рассмотрим на примере электроприводного ПР модели HdS05/06 (фирма GdA, Германия) наиболее распространенную функциональную схему, рис. 3.12.
Читать дальшеИнтервал:
Закладка: