Норберт Винер - Кибернетика или управление и связь в животном и машине

- Название:Кибернетика или управление и связь в животном и машине
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Норберт Винер - Кибернетика или управление и связь в животном и машине краткое содержание
«Кибернетика» — известная книга выдающегося американского математика Норберта Винера (1894—1964), сыгравшая большую роль в развитии современной науки и давшая имя одному из важнейших ее направлений. Настоящее русское издание является полным переводом второго американского издания, вышедшего в 1961 г. и содержащего важные дополнения к первому изданию 1948 г. Читатель также найдет в приложениях переводы некоторых статей и интервью Винера, включая последнее, данное им незадолго до смерти для журнала «Юнайтед Стэйтс Ньюс энд Уорлд Рипорт».
Книга, написанная своеобразным свободным стилем, затрагивает широкий круг проблем современной науки, от сферы наук технических до сферы наук социальных и гуманитарных. В центре — проблематика поведения и воспроизведения (естественного и искусственного) сложных управляющих и информационных систем в технике, живой природе и обществе. Автор глубоко озабочен судьбой науки и ученых в современном мире и резко осуждает использование научного могущества для эксплуатации и войны.
Книга предназначена для научных работников и инженеров.
Кибернетика или управление и связь в животном и машине - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Можно считать, что всякое целенаправленное действие требует отрицательной обратной связи. Если цель должна быть достигнута, то в какой-то момент необходимы сигналы от нее, чтобы направить поведение. Под поведением без обратной связи понимается такое, при котором сигналы от цели не изменяют деятельности объекта в процессе поведения. Так, можно послать машину сразить светящийся объект, хотя машина может быть нечувствительна к свету. Подобно этому змея может броситься на лягушку или лягушка — на муху, не получая зрительных или иных впечатлений от жертвы после начала движения. Действительно, движение в этих случаях происходит настолько быстро, что нервные импульсы едва ли имеют время сформироваться в сетчатке глаза, дойти до центральной нервной системы и возбудить новые импульсы, которые бы своевременно достигли мышц для эффективной перемены поведения.
В противоположность рассмотренным примерам поведение некоторых машин и некоторые реакции живых организмов включают в себя непрерывную обратную связь от цели, изменяющую и направляющую [c.300]действующий объект. Этот тип поведения эффективнее, чем предыдущий, особенно когда цель нестационарна. Но управление с непрерывной обратной связью способно привести к весьма неуклюжему поведению, если обратная связь плохо демпфирована и для некоторых частот колебаний вместо отрицательной становится положительной. Предположим, например, что построена машина для поражения движущейся светящейся цели; траектория, описываемая машиной, регулируется направлением и силой света от цели. Предположим, что следуя движению цели в определенном направлении, машина далеко проскочит за цель и что будет приложено чрезмерно большое усилие, чтобы развернуть машину в противоположном направлении. Если это движение вновь промахнется, начнется серия все более сильных колебаний, и машина упустит цель.
Эта картина последствий недемпфированной обратной связи удивительно напоминает то, что наблюдается при выполнении произвольного действия больным, у которого поврежден мозжечок. В состоянии покоя субъект не обнаруживает заметного двигательного расстройства. Если, однако, попросить его поднести ко рту стакан с водой, то рука, несущая стакан, будет совершать, по мере приближения к цели, серию колебательных движений возрастающей амплитуды; в результате вода расплещется, и намерение не будет осуществлено. Этот симптом типичен для расстроенной моторики больных с мозжечковым заболеванием. Аналогия с поведением машины, наделенной недемпфированной обратной связью, столь очевидна, что мы решаемся видеть главную функцию мозжечка в регулировании нервных механизмов обратной связи, участвующих в целенаправленной двигательной активности.
Целенаправленное поведение с обратной связью можно опять подразделить. Оно может быть экстраполирующим (предсказывающим) или неэкстраполирующим (непредсказывающим). Реакции одноклеточных организмов, так называемые тропизмы, дают примеры непредсказывающего поведения. Амеба просто следует за источником, на который она реагирует; нет никаких данных о том, что она экстраполирует его траекторию. С другой стороны, предсказывающее поведение животных — самая обыкновенная вещь. Кошка, начинающая [c.301]преследование бегущей мыши, не бежит прямо к месту, где мышь в данный момент находится, а движется к экстраполированному будущему положению. Не составит также труда найти примеры предсказывающих и непредсказывающих сервомеханизмов.
Предсказывающее поведение можно подразделить на различные порядки. Кошка, охотящаяся за мышью, — пример предсказания первого порядка; она предсказывает только мышиный путь. Бросание камня в движущуюся мишень требует предсказания второго порядка; здесь необходимо предвидеть пути мишени и камня. Примером предсказания более высокого порядка является стрельба из рогатки или лука.
Предсказывающее поведение требует различения по меньшей мере двух координат: оси времени и хотя бы одной пространственной оси. Предсказание, однако, будет эффективнее и гибче, если действующий объект способен реагировать на изменения более чем в одной пространственной координате. Чувствительные рецепторы организма или соответствующие им элементы машины могут поэтому ограничивать предсказывающее поведение. Так, собака-ищейка следует следу; предсказывающее поведение ей не доступно, потому что химический, обонятельный вход приносит только пространственную информацию — расстояние, указываемое силой запаха. Внешние изменения, способные возбуждать слуховые или, еще лучше, зрительные рецепторы, допускают более точную пространственную локализацию; отсюда возможность более эффективных предсказывающих реакций при действии входа на эти рецепторы.
Способность к предсказывающим действиям встречает, помимо того, ограничения во внутренней организации действующего объекта. Так, машина, предназначенная для предсказывающего слежения за подвижной светящейся целью, должна не только быть чувствительна к свету (например, через приданный ей фотоэлемент), но и обладать структурой, пригодной для расшифровки светового входа. Представляется вероятным, что ограничения внутренней организации, особенно организации центральной нервной системы, определяют сложность предсказывающего поведения, которой может достичь млекопитающее. Так, можно подумать, что нервная система крысы или собаки не позволяет им [c.302]осуществлять интеграцию входа и выхода, необходимую дли предсказывающей реакции третьего или четвертого порядка. Действительно, одна из особенностей скачка, наблюдаемого при сравнении человека с другими высшими млекопитающими, заключается, по-видимому, в том, что последние способны лишь к предсказывающему поведению низшего порядка, тогда как человек потенциально способен к весьма высоким порядкам предсказания.
Ниже приводится таблица предлагаемой классификации поведения:
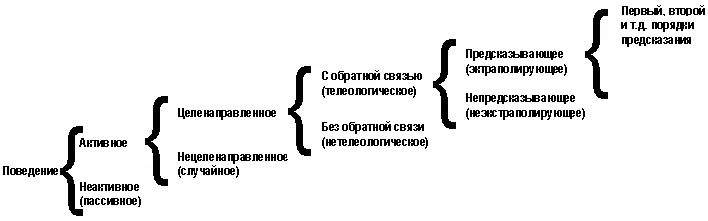
Нетрудно видеть, что каждая из дихотомий произвольно выделяет одну черту, признаваемую интересной, оставляя аморфный остаток — не-класс. Очевидно также, что критерии отдельных дихотомий разнородны. Понятно поэтому, что существует много других линий классификации, независимых от рассмотренных. Так, можно разделить поведение в целом или внутри каждой из табличных групп на линейное (выход пропорционален входу) и нелинейное. Для многих целей было бы полезно деление на непрерывное и дискретное поведение. Различные степени свободы, свойственные поведению, также могут служить основанием систематизации.
Читать дальшеИнтервал:
Закладка: