Юсуф Азимов - Современные системные технологии в отраслях экономики. Учебное пособие

- Название:Современные системные технологии в отраслях экономики. Учебное пособие
- Автор:
- Жанр:
- Издательство:Литагент Проспект (без drm)
- Год:2015
- ISBN:9785392186150
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Юсуф Азимов - Современные системные технологии в отраслях экономики. Учебное пособие краткое содержание
Современные системные технологии в отраслях экономики. Учебное пособие - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Из рис. 3.5 видно, что правильное определение характера проектируемого ТП и степени его технической оснащенности, наиболее рациональных для данных условий конкретного серийного производства, является очень сложной задачей, требующей от технолога понимания реальной производственной обстановки, ближайших перспектив развития предприятия и умения проводить серьезные технико-экономические расчеты и анализы.
3.5. Классификация и виды промышленных роботов
П р о м ы ш л е н н ы й робот (ПР) – это автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций (рис. 3.6).
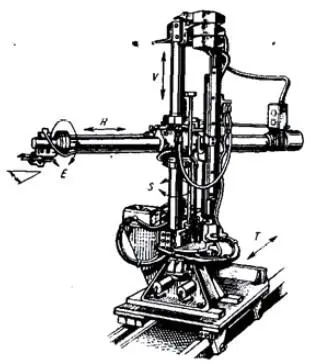
Рис. 3.6 . Промышленный робот ные роботы обеспечивают с основными видами движений
Благодаря быстрой переналадке промышленнаибольший эффект в условиях частой смены объектов производства, а также при автоматизации ручного низкоквалифицированного труда. Применение промышленных роботов в массовом производстве позволяет в короткие сроки комплектовать средствами автоматизации автоматические линии различного назначения.
Как показывает опыт, комплексное применение промышленных роботов позволяет повысить производительность труда, сменность работы оборудования, а также существенно улучшить ритмичность и общую культуру производства.
Использование роботов открывает перспективы создания принципиально новых технологических процессов, не связанных с ограничениями, налагаемыми непосредственным участием человека.
Управляемое устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека, при перемещении объектов в пространстве, оснащенное рабочим органом, называется манипулятором. В зависимости от метода управления манипуляторы могут быть с ручным, автоматическим и интерактивным (комбинированным) управлением. Манипулятор с ручным управлением – устройство, в процессе управления которым непрерывно участвует оператор. Манипулятор с интерактивным управлением – устройство, в процессе управления которым автоматический и ручной методы управления чередуются во времени.
Автоматический манипулятор обеспечивает выполнение двигательных функций без участия оператора. Автооператор – неперепрограммируемый автоматический манипулятор.
Основными структурными составными частями ПР являются исполнительное устройство, система управления и информационная система (рис. 3.7). Исполнительное устройство ПР выполняет его двигательные функции. В состав ПР входит манипулятор и устройство передвижения.
Система управления – совокупность функционально взаимосвязанных и взаимодействующих средств управления, обеспечивающих обучение (программирование), сохранение программы и ее воспроизведение (считывание информации и передачу управляющих сигналов исполнительным органам ПР).
Информационная система – совокупность взаимосвязанных и взаимодействующих технических средств, обеспечивающих получение, преобразование, обработку и передачу информации о состоянии ПР и внешней среды.
В зависимости от выполняемых функций ПР подразделяются на подъемно-транспортные (вспомогательные), производственные (технологические) и универсальные.
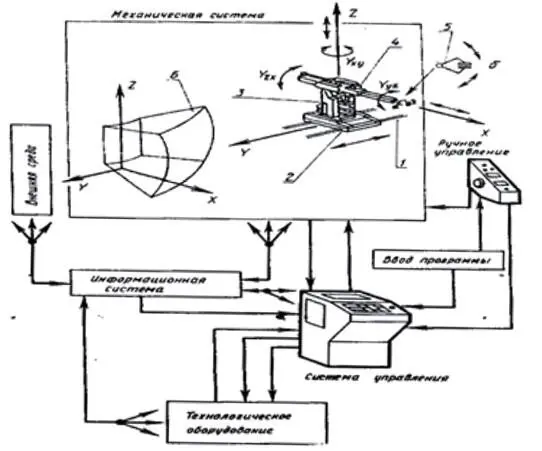
Рис. 3.7. Структурная схема промышленного робота, основные элементы конструкции и движения рабочих органов
Подъемно-транспортный ПР предназначен для выполнения вспомогательных переходов или операций перемещения; выполняет действия типа взять-положить при обслуживании основного технологического оборудования на операциях транспортирования, установки заготовок н снятия деталей, инструмента и приспособлений, очистке баз деталей и оборудования, а также на транспортно-складских операциях.
Производственный (технологический) ПР предназначен для выполнения технологических операций переходов; он непосредственно участвует в технологическом процессе в качестве производящей или обрабатывающей машины, выполняющей основные технологические операции (гибку, сварку, окраску, сборку и т. п.).
Универсальный ПР может выполнять функции подъемно-транспортного (вспомогательного) и производственного (технологического) промышленных роботов.
Функциональные возможности ПР во многом определяются типом системы программного управления (СНУ) и характером отработки программ.
В ПР применяются три типа СПУ, классифицируемые в соответствии с характером и дискретностью перемещений степеней подвижности: позиционные – от точки к точке, контурные – по непрерывной траектории, когда положение рабочих органов определено в каждый момент времени, и комбинированные (универсальные).
По способу представления задающей информации СПУ можно разделить на электромеханические, цикловые (ЦПУ), аналоговые (АПУ), числовые (ЧПУ) и аналого-числовые (гибридные).
В электромеханических системах информация задается положением упоров, настройкой реле времени, кулачками распределительного механизма, копирами и т. п.
В системах ЦПУ управляющие команды задаются в числовом виде, а геометрическая информация – положением механических упоров или подключением конечных выключателей.
В аналоговых СПУ информация задается в виде потенциалов. В качестве элементной базы в таких системах используются решающие и операционные усилители постоянного тока.
В системах ЧПУ (позиционных и контурных) информация представлена в виде цифровых кодов, хранящихся на быстросменных носителях.
В гибридных СПУ может использоваться информация, представленная в различном виде – числовом, аналоговом и т. д.
3.6. Характеристика типовых принципов функционирования химико-технологических систем (ХТС)
По принципам функционирования ХТС принято делить на следующие классы [2]:
1. НХТС – ХТС с непрерывной организацией технологического процесса (непрерывные) – химические производства, работающие безостановочно в течение длительного времени. Остановка и перезапуск таких производств связаны с большими материальными и временными затратами.
2. ПХТС – ХТС с периодической организацией технологического процесса (периодические) – химические производства, реализующие химические процессы в аппаратах периодического действия циклически. Обычно это производства малотоннажной химии.
Читать дальшеИнтервал:
Закладка: