Владислав Масликов - Универсум. Общая теория управления

- Название:Универсум. Общая теория управления
- Автор:
- Жанр:
- Издательство:Array Литагент «Алгоритм»
- Год:2015
- Город:Москва
- ISBN:978-5-906798-28-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владислав Масликов - Универсум. Общая теория управления краткое содержание
Посредством универсумного подхода к процессам управления можно решать практические задачи в самых различных областях научного знания: в производственной сфере, экономике, социологии и других сферах деятельности, по мере необходимости переходя с уровня систематизации фактов к моделированию процессов, затем к целенаправленному прогнозированию и управлению ими. Текст сопровождается большим количеством иллюстративного материала – рисунками, схемами, таблицами, позволяющими легко понимать представленный материал.
Работа рассчитана не только на специалистов в области теории управления, но и философов, социологов и конструкторов сложных автоматизированных систем. Также адресована преподавателям, аспирантам, студентам и всем, кого интересуют принципы организации и работы интеллекта.
Универсум. Общая теория управления - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Можно рассмотреть работу этих режимов на совокупной сравнительной схеме (рис. 6.7).
Программный режим ( ∆t 1, рис. 6.7) имеет возможности подстройки системы в самом узком диапазоне ( d 1 ) внешних воздействий, адаптивный режим расширяет способности системы (диапазон d 2 ) без изменения иерархического порядка элементов векторов управления (отклонения входят в диапазон «Ранжирование векторов № 2») и без смены целевой функции (нижняя половина рисунка «Целевая функция № 1»).
Работа системы в режиме слабого манёвра ( ∆t 3 , точки траектории от А до В) предусматривает изменение порядка расположения элементов векторов управления («Ранжирование векторов № 2» меняется на «Ранжирование векторов № 1»), но также производится без смены целевой функции («Целевая функция № 1»). При этом диапазон отрабатываемых системой внешних воздействий ( d 3 ) за счёт включения в алгоритмику работы более одного диапазона ранжирования резко расширяется. В этом новом состоянии система может переключиться в новый адаптационный балансовый режим (диапазон d 4 , точки от В до С).
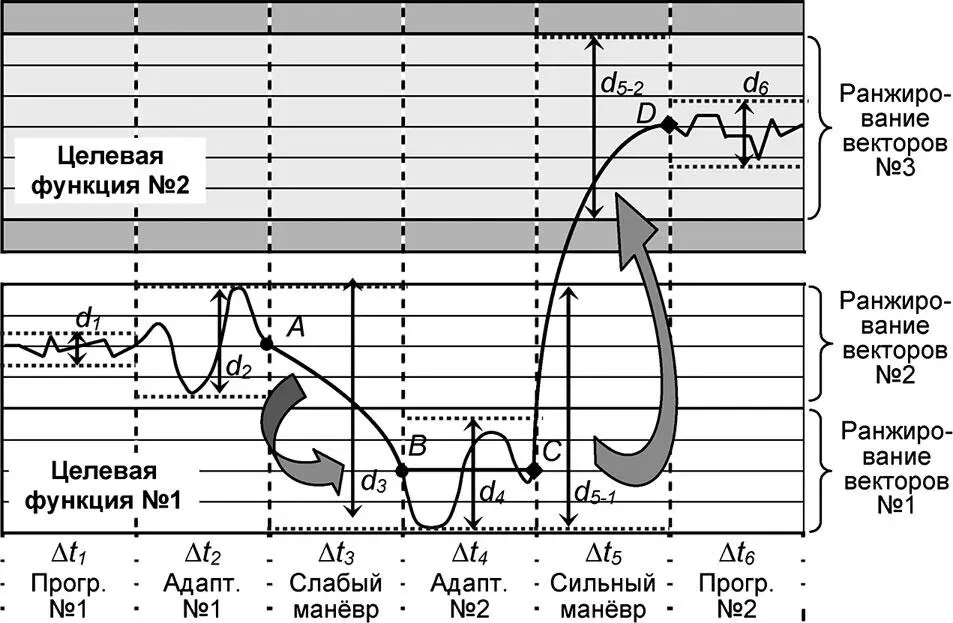
Рис. 6.7. Связь векторов управления с траекториями процесса управления
Переход системы в режим сильного манёвра ( d 5–1 и d 5–2 , точки С и D) означает ещё большее расширение диапазона работы и изменение целевой функции управления («Целевая функция № 1» заменяется областью «Целевая функция № 2»), после которого можно «уже в новой системе координат» перейти в другие режимы работы, например, в режим слабого манёвра, в адаптивный и затем в программный ( ∆t 6 ), тем самым сузив и оптимизировав диапазон отработки внешних воздействий ( d 6 ).
Таким образом, во-первых, целевая функция или концепция управления – это алгоритмика обнуления элементов векторов ошибки управления и, во-вторых, ранжирование векторов управления по универсумному принципу позволяет определить ответ на вопрос, можно ли считать процесс управления успешным, если часть параметров, заложенных в векторы, ухудшилась, а часть улучшилась.
Ответ прост: качество управления улучшилось, если улучшились параметры более приоритетных (информационных) элементов векторов и качество управления ухудшилось, если значения этих параметров ухудшилось. Ещё раз отметим: улучшение/ухудшение параметров векторов, имеющих более высокий приоритет рано или поздно, но неизбежно приводит к соответствующему изменению значений в менее приоритетных элементах векторов.
Следует подчеркнуть, что в соответствии с U-законом неразрывности переход системы с одного в другой режим может осуществляться только последовательно, страта за стратой, поэтому при переводе системы из адаптационного режима в точке С в режим сильного манёвра по умолчанию подразумевается вначале перевод системы в режим слабого манёвра, и только затем в область сильного манёвра. Аналогично и в точке D после осуществления сильного манёвра система по умолчанию должна перейти в режим слабого маневра, затем в адаптационный режим, и лишь после этого она может работать в программном режиме.
Диапазон колебаний траектории программного режима работы определяется главным образом «материальными» ограничениями конструкции системы. Диапазон колебаний траектории адаптивного режима работы определяется главным образом «материальными» ограничениями настраиваемых элементов системы. Диапазон колебаний траектории «слабого манёвра» определяется глубиной и сложностью предикционного расчёта. Диапазон колебаний траектории «сильного манёвра» определяется интеллектуальным уровнем, определяющим возможности суперсистемы к прогностике.
Привязка режимов управления к типологизации систем управления показывает их однозначное соответствие (рис. 6.8). Программный и адаптивный тип СУ – это балансировочные режимы работы, прогностический (предикционный) и интеллектуальный – это манёвры супер/систем.

Рис. 6.8. Соответствие типа СУ режимам управления классов 4U и 2U
Конечно же, данная стратификация не является догмой: универсумный подход позволяет детализировать это описание, разбив его на пять, шесть, восемь, сто двадцать восемь и любое другое количество уровней в зависимости от требований к точности описания систем различной сложности. Универсумный подход позволяет более точно представить и однозначно связать между собой описание различных схем, режимов, систем, областей состояний и критериев качества процесса управления.
6.3. Гибкость и устойчивость и управления
Скорость перехода системы с одного режима работы на другой определяет гибкость рассматриваемой системы управления.
Одно из наиболее распространённых и традиционных определений понятия «гибкость» подразумевает « свойство алгоритма, определяемое возможностью его адаптации к изменениям входной информации без изменения решаемой задачи » [53, 69]. С универсумной точки зрения понятие «гибкость» определяется способностью системы в зависимости от конкретного набора входных воздействий S обеспечивать своевременное переключение между различными режимами (схемами) управления для получения необходимой реакции R. Это переключение организует высшая освоенная данным универсумом страта управления. В практическом аспекте гибкость – это набор параметров (скорость, энергопотребление, импульсная мощность и др.), определяющих способность системы к переключению между режимами управления с целью сохранения устойчивости функционирования во внешней среде.

Рис. 6.9. Устойчивость объекта на поверхности различного типа
Что касается понятия «устойчивости», то, как известно, в большинстве отраслей науки и в технике понятие «устойчивость» построено на основе присущей объекту тенденции возвращаться к исходному режиму существования по всем (или по части)
параметрам, характеризующим его поведение, после того, как возмущающее воздействие, вызвавшее первоначальное отклонение параметров, будет снято. Периодические колебания приведут систему «шар-тарелка» в точку равновесия – устойчивости (рис. 6.9а). Отсутствие такой тенденции или наличие противоположной тенденции определяется как «неустойчивость». В этом случае отклонение шара от точки равновесия лишит систему «шар-тарелка» устойчивости (рис. 6.9б). то есть, в классической точке зрения устойчивая система просто должна «отработать» влияние внешнего фактора и вернуться на расчётную траекторию. Неустойчивая система самостоятельно возвратиться на заданную траекторию после снятия внешнего воздействия не может.
Читать дальшеИнтервал:
Закладка: