Владимир Петров - Законы и закономерности развития систем. Книга 4

- Название:Законы и закономерности развития систем. Книга 4
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:9785005163738
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Петров - Законы и закономерности развития систем. Книга 4 краткое содержание
Законы и закономерности развития систем. Книга 4 - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
22.2.3. Управляемая система
Автоматическое управление 4 4 Автоматическое управление – БСЭ http://slovar.cc/enc/bse/1970183.html .
в технике – совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления.
Цель управления – это изменение выходной величины управляемого объекта.
Тенденция перехода от неуправляемой к управляемой системе показана на рис. 22.17. Она представляет собой:
Переход от неуправляемой системы к управлению по разомкнутому контуру, затем к переходу к системе с обратной связью, к адаптивной (самонастраивающейся) системе, к самообучаемой и самоорганизующейся системе и, наконец, к саморазвивающейся и самовоспроизводящей системе.
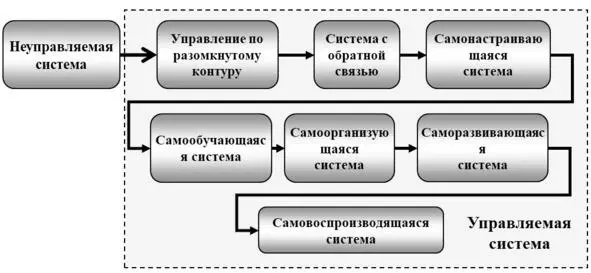
Рис. 22.17.Переход от неуправляемой системы к управляемой
Управление по разомкнутому контуруосуществляется без знаний о текущем состоянии об управляемом объекте. При таком управлении чаще всего управление ведется по жесткой программе, без анализа каких-либо факторов в процессе работы, либо измеряют и компенсируют главные из возмущений.
Для этого вида управления характерно отсутствие обратной связи, с помощью которой можно получить информацию о том, что происходит в объекте управления.
Структурная схема системы управления по разомкнутому контуру показана на рис. 22.18. Устройство управления воздействует на объект управления по программе, находящейся в задающем устройстве. На объект управления могут воздействовать возмущения. Некоторые системы по разомкнутому циклу измеряют главные из возмущений и компенсируются.
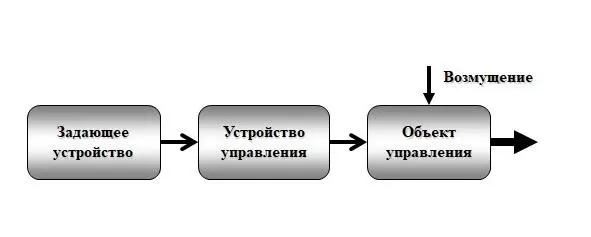
Рис. 22.18.Система управления по разомкнутому контуру
Этот вид управления достаточно примитивен, но часто исполнительные устройства просты, надежны и дешевы. По такому принципу работают примитивные автоматы и конвейерные линии.
Условия предпочтения управления по разомкнутому контуру управлению по замкнутому контуру:
– не нужны высокоточные операции;
– система может работать удовлетворительно без гарантии изменений, которые происходят в объекте управления.
Приведем примеры систем, работающих по разомкнутому циклу.
Пример 22.7. Стиральная машина
Переключение команд в стиральной машине осуществляется по определенной программе.
Пример 22.8. Сильфон
В сильфоне (рис. 22.19), заполненном жидкостью, входным сигналом является теплота. Жидкость и окружающая ее оболочка вместе с сильфоном представляют собой датчик и усилитель.
Выход системы – это стержень или подвижный рычаг.
Существенным для этой системы является довольно высокие значения движущей силы и длинный ход, который можно получить на выходе: обычный показатель – от полу килограмма до нескольких килограммов в зависимости от размера сильфона. А ход может изменяться в диапазоне от миллиметров до нескольких сантиметров. По сути, это практичный вариант исполнительного устройства с прямым линейным приводом без двигателей или электроэнергии.
Сравнивая схему управления и устройство системы, наглядно видно, что сильфон является физическим представлением системы управления по разомкнутому контуру.
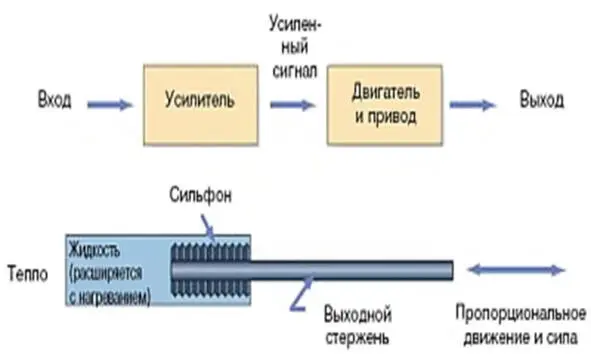
Рис. 22.19.Сильфон
Пример 22.9. Система прижатия полупроводниковой пластины
Для прижатия полупроводниковой пластины во время обработки используют сильфон (рис. 22.20). Он растягивается и сжимается по мере изменения давления, находясь в одном из двух состояний – сжатом или растянутом. Обработка пластины ведется в вакууме, сильфон растягивается, выдвигая зажим, который прижимает пластину. Когда камера открывается, в ней оказывается атмосферное давление, сильфон сжимается, отодвигая зажим и высвобождая пластину.
Это система работает по разомкнутому контуру. В ней нет обратной связи, чтобы удостовериться, что зажим был приведен в действие. Исключена необходимость размещения внутри камеры датчиков, приводов и устройства вывода из нее подводов. Система проста и надежна.
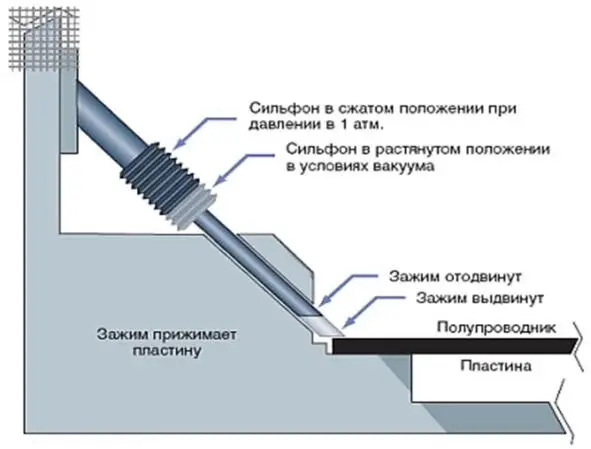
Рис. 22.20.Система прижатия полупроводниковой пластины
Вид систем, где предпочтительно использовать управление по разомкнутому контуру:
– чаще всего механические системы;
– системы, допускающие их корректировку оператором для компенсации ошибок;
– системы, предназначенные для работы продолжительное время с минимальным вниманием оператора;
– системы, не требующие повторной калибровки;
– системы, простые по функциям и в конструкции системы, в которых отдельные компоненты выполняют многочисленные задачи;
– системы, непрерывно работающие даже без необходимости;
– системы, в которых стоимость важнее точности.
Система с обратной связьюпредставляет собой систему, работающую по замкнутому контуру. В такой системе осуществляется регулирование по отклонению, а цепь прохождения сигналов образует замкнутый контур, включающий объект управления и управляющее устройство.
Пример 22.10. Водопроводный кран
При мытье рук сначала включают кран, а потом используют мыло. Во время мытья расходуется много лишней воды. Как сократить расходы?
Существуют системы, выдающие определенную порцию воды, – это управление по разомкнутому циклу.
Выпускается водопроводный кран, в нижней части которого имеются излучатель и приемник инфракрасного излучения. При поднесении рук под кран включается вода
(рис. 22.21). Когда руки убираются из-под крана – вода выключается. Такой кран сберегает много воды и окупается в течение шести месяцев 5 5 Central Brass Manufacturing. Design News, 1989, vol. 44, No.22. «Energy», No. 11, 1989. USA.
. Это пример системы с обратной связью.
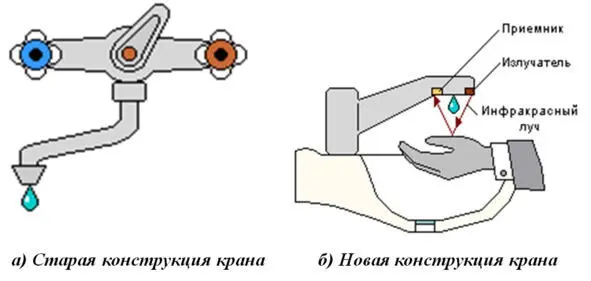
Рис. 22.21.Автоматизированный водопроводный кран
Структурная схема системы управления с обратной связью показана на рис. 22.22. Устройство управления воздействует на объект управления посредством сигнала (управляющего воздействия) в соответствии с ошибкой управления, которая вырабатывается в результате сравнения сигнала обратной связи с задающим воздействием. На объект управления могут воздействовать возмущения.
Читать дальшеИнтервал:
Закладка:
![Уилл Дюрант - Уроки истории [Закономерности развития цивилизации за 5000 лет]](/books/1073450/uill-dyurant-uroki-istorii-zakonomernosti-razvitiya.webp)