Марк Руссинович - 1.Внутреннее устройство Windows (гл. 1-4)

- Название:1.Внутреннее устройство Windows (гл. 1-4)
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Марк Руссинович - 1.Внутреннее устройство Windows (гл. 1-4) краткое содержание
Книга посвящена внутреннему устройству и алгоритмам работы основных компонентов операционной системы Microsoft Windows — Windows Server 2003, Windows XP и Windows 2000 — и файловой системы NTFS. Детально рассмотрены системные механизмы: диспетчеризация ловушек и прерываний, DPC, APC, LPC, RPC, синхронизация, системные рабочие потоки, глобальные флаги и др. Также описываются все этапы загрузки операционной системы и завершения ее работы. B четвертом издании книги больше внимания уделяется глубокому анализу и устранению проблем, из-за которых происходит крах операционной системы или из-за которых ее не удается загрузить. Кроме того, рассматриваются детали реализации поддержки аппаратных платформ AMD x64 и Intel IA64. Книга состоит из 14 глав, словаря терминов и предметного указателя. Книга предназначена системным администраторам, разработчикам серьезных приложений и всем, кто хочет понять, как устроена операционная система Windows.
Названия всех команд, диалоговых окон и других интерфейсных элементов операционной системы приведены как на английском языке, так и на русском.
Версия Fb2 редакции — 1.5. Об ошибках просьба сообщать по адресу — general2008@ukr.net.
1.Внутреннее устройство Windows (гл. 1-4) - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
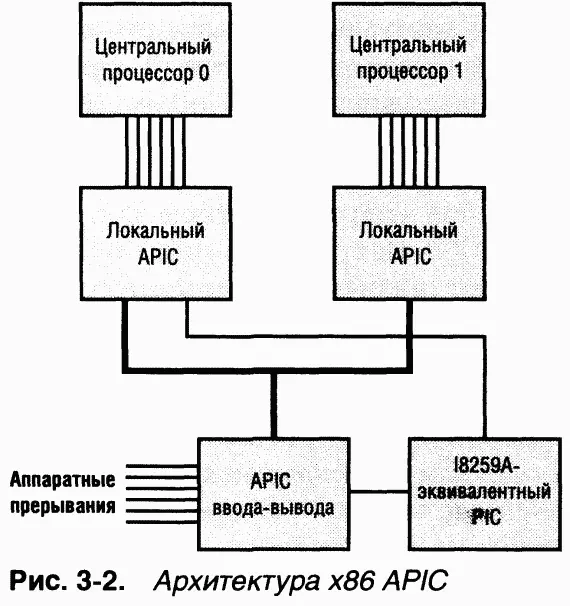
Поскольку архитектура x64 совместима с операционными системами для x86, системы на базе x64 должны предоставлять те же контроллеры прерываний, что и на базе x86. Однако х64-версии Windows не будут работать на системах без APIC (т. е. они не поддерживают PIC).
B архитектуре IA64 используется контроллер прерываний Streamlined Advanced Programmable Interrupt Controller (SAPIC) — результат эволюционного развития APIC Главное различие между архитектурами APIC и SAPIC в том, что APIC ввода-вывода в APIC-системе направляет прерывания локальным APIC по выделенной шине APIC, тогда как в системе SAPIC прерывания передаются по шине ввода-вывода и системы (I/O and system bus) для большего быстродействия. Еще одно различие — перенаправление прерываний и балансировка нагрузки в APIC-системе обрабатывается самой шиной APIC, а в SAPIC-системе, где нет выделенной шины APIC, требуется, чтобы соответствующая поддержка была запрограммирована в микрокоде (прошивке). Ho, даже если эта поддержка имеется в микрокоде, Windows не использует ее — вместо этого она статически назначает прерывания процессорам по принципу карусели.
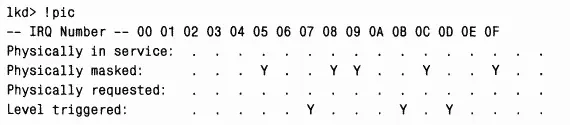
ЭКСПЕРИМЕНТ: просмотр конфигурации PIC и APIC
Конфигурацию PIC в однопроцессорной системе и APIC в многопроцессорной системе можно просмотреть с помощью команд !pic или !apic отладчика ядра. (Для этого эксперимента LiveKd не годится, так как она не может напрямую обращаться к оборудованию.) Ниже показан образец вывода команды !pic в однопроцессорной системе (учтите, что команда !pic не работает в системе, использующей APIC HAL).
Ha следующем листинге приводится выходная информация команды !apic в системе, использующей MPS HAL. Префикс «0:» в командной строке отладчика говорит о том, что текущие команды выполняются на процессоре 0, поэтому данный листинг относится к APIC ввода-вывода процессора 0.
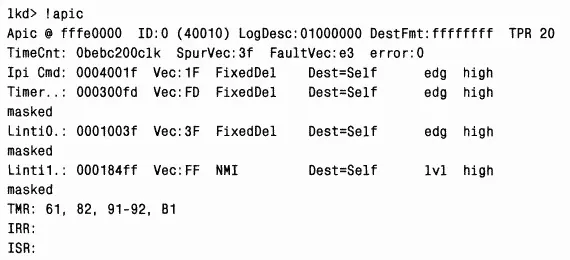
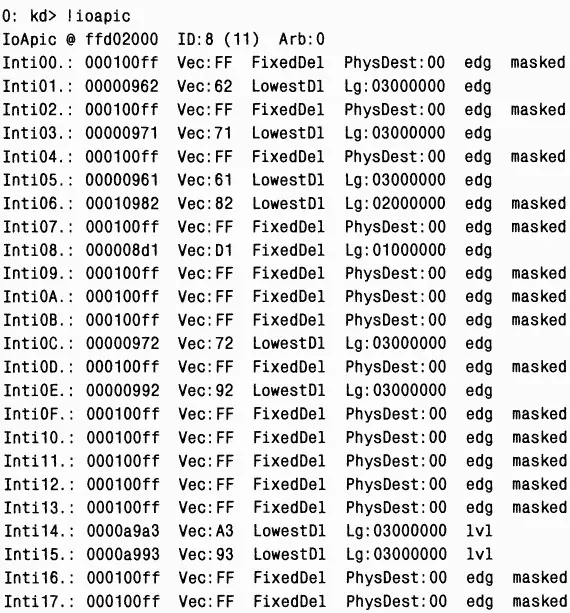
Теперь взгляните на образец вывода команды !ioapic, показывающей конфигурацию APIC ввода-вывода:
Хотя контроллеры прерываний различают уровни приоритетов прерываний, Windows использует свою схему приоритетов прерываний, известную под названием уровни запросов прерываний (interrupt request levels, IRQL). Внутри ядра IRQL представляются в виде номеров 0-31 в системах x86 и 0-15 в системах x64 и IA64, причем больший номер соответствует прерыванию с более высоким приоритетом. Ядро определяет стандартный набор IRQL для программных прерываний, a HAL увязывает IRQL с номерами аппаратных прерываний. IRQL, определенные для архитектуры x86, показаны на рис. 3–3, а аналогичные сведения для архитектур x64 и IA64 — на рис. 3–4.
ПРИМЕЧАНИЕ Уровень SYNCH_LEVEL, используемый многопроцессорными версиями ядра для защиты доступа к индивидуальным для каждого процессора блокам PRCB (processor control blocks), не показан на этих схемах, так как его значение варьируется в разных версиях Windows. Описание SYNCH_LEVEL и его возможных значений см. в главе 6.
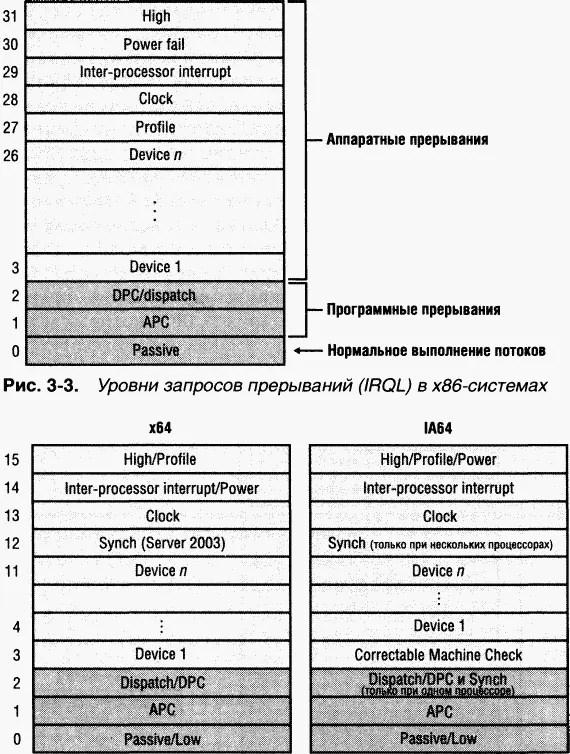
Рис. 3–4. Уровни запросов прерываний (IRQL) в системах x64 и IA64
Прерывания обслуживаются в порядке их приоритета, и прерывания с более высоким приоритетом вытесняют обработку прерываний с меньшим приоритетом. При возникновении прерывания с высоким приоритетом процессор сохраняет информацию о состоянии прерванного потока и активизирует сопоставленный с данным прерыванием диспетчер ловушки. Последний повышает IRQL и вызывает процедуру обслуживания прерывания (ISR). После выполнения ISR диспетчер прерывания понижает IRQL процессора до исходного уровня и загружает сохраненные ранее данные о состоянии машины. Прерванный поток возобновляется с той точки, где он был прерван. Когда ядро понижает IRQL, могут «материализоваться» ранее замаскированные прерывания с более низким приоритетом. Тогда вышеописанный процесс повторяется ядром для обработки и этих прерываний.
Уровни приоритетов IRQL имеют совершенно иной смысл, чем приоритеты в схеме планирования потоков (см. главу 6). Приоритет в этой схеме является атрибутом потока, тогда как IRQL — атрибутом источника прерывания, например клавиатуры или мыши. Кроме того, IRQL каждого процессора меняется во время выполнения команд операционной системы.
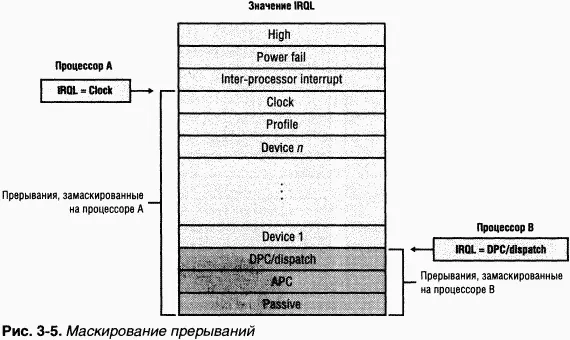
Значение IRQL определяет, какие прерывания может получать данный процессор. IRQL также используется для синхронизации доступа к структурам данных режима ядра (о синхронизации мы поговорим позже). При выполнении поток режима ядра повышает или понижает IRQL процессора либо напрямую (вызовом соответственно KeRaiseIrql или KeLowerIrqL), либо — что бывает гораздо чаще — опосредованно (через функции, которые обращаются к синхронизирующим объектам ядра). Как показано на рис. 3–5, прерывания от источника с IRQL, превышающим текущий уровень, прерывают работу процессора, а прерывания от источников, IRQL которых меньше или равен текущему уровню , маскируются до тех пор, пока выполняемый поток не понизит IRQL.
Поскольку доступ к PIC — операция довольно медленная, в HAL, использующих PIC, реализован механизм оптимизации «отложенный IRQL» (lazy IRQL), который избегает обращений к PIC Когда IRQL повышается, HAL — вместо того чтобы изменять маску прерывания — просто отмечает новый IRQL. Если вслед за этим возникает прерывание с более низким приоритетом, HAL устанавливает маску прерывания в соответствии с первым и откладывает обработку прерывания с более низким приоритетом до понижения IRQL. Таким образом, если при повышенном IRQL не возникнет прерываний с более низким приоритетом, HAL не потребуется обращаться к PIC.
Поток режима ядра повышает и понижает IRQL процессора, на котором он выполняется, в зависимости от того, что именно делает этот поток. Например, обработчик ловушки (или сам процессор) при прерывании повышает IRQL процессора до IRQL источника прерывания. B результате все прерывания с более низким или равным IRQL маскируются (только на этом процессоре), что не дает прерыванию с таким же или более низким IRQL помешать процессору обработать текущее прерывание. Замаскированные прерывания либо обрабатываются другим процессором, либо откладываются до понижения IRQL. Поэтому все системные компоненты, в том числе ядро и драйверы устройств, пытаются удерживать IRQL на уровне passive («пассивный»), иногда называемом низким уровнем. Если бы IRQL долго оставался неоправданно высоким, драйверы устройств не смогли бы оперативно реагировать на аппаратные прерывания.
Читать дальшеИнтервал:
Закладка: