Дональд Бокс - Сущность технологии СОМ. Библиотека программиста

- Название:Сущность технологии СОМ. Библиотека программиста
- Автор:
- Жанр:
- Издательство:Питер
- Год:2001
- Город:СПб
- ISBN:5-318-00058-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Дональд Бокс - Сущность технологии СОМ. Библиотека программиста краткое содержание
В этой книге СОМ исследуется с точки зрения разработчика C++. Написанная ведущим специалистом по модели компонентных объектов СОМ, она раскрывает сущность СОМ, помогая разработчикам правильно понять не только методы модели программирования СОМ, но и ее основу. Понимание мотивов создания СОМ и ее аспектов, касающихся распределенных систем, чрезвычайно важно для тех разработчиков, которые желают пойти дальше простейших приложений СОМ и стать по-настоящему эффективными СОМ-программистами. Показывая, почему СОМ для распределенных систем (Distributed СОМ) работает именно так, а не иначе, Дон Бокс дает вам возможность применять эту модель творчески и эффективно для ежедневных задач программирования.
Сущность технологии СОМ. Библиотека программиста - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
В предыдущей главе было показано, что QueryInterface можно реализовать непосредственно, используя статические преобразования типа для того, чтобы ограничить область действия указателя this на объект типом интерфейса, который запрашивается клиентом. На физическом уровне этот способ означает просто преобразование идентификаторов интерфейса в объект с помощью соответствующего смещения, то есть способ, который применяется любым компилятором C++ при реализации dynamic_cast .
Хотя реализации QueryInterface из предыдущей главы являются вполне допустимыми для СОМ, правила IUnknown предоставляют разработчику объектов значительно больше гибкости, чем было показано до сих пор. В данной главе эти правила будут исследованы, и продемонстрированы способы реализации, которые из них вытекают.
Снова IUnknown
IUnknown не имеет реализации по умолчанию, которая являлась бы частью интерфейса системного вызова СОМ. Заголовочные файлы SDK не содержат базовых классов, макросов или шаблонов, предусматривающих реализации QueryInterface , AddRef и Release , которые должны использоваться во всех программах на С или C++. Вместо этого Спецификация СОМ ( Component Object Model Specification ) предоставляет очень точные правила относительно допущений, которые клиенты и объекты могут делать относительно этих трех методов. Этот набор правил формирует протокол IUnknown и позволяет каждому разработчику объекта преобразовать три указанных метода IUnknown во все, что имеет смысл для его или ее объекта.
В главе 2 представлены фактические С++-реализации трех упомянутых методов, но СОМ никоим образом не обязывает объекты использовать их. Все, что требует СОМ, – это чтобы каждая реализация придерживалась базовых правил IUnknown . Как это достигается, не имеет ни малейшего отношения к СОМ. Это делает СОМ совершенно ненавязчивой, так как эта модель не требует, чтобы объект делал системные вызовы, наследовал системным реализациям, а все, что от него требуется, – это объявлять совместимые с СОМ указатели vptr . На самом деле, как будет показано далее в этой главе, можно выставлять наследующие IUnknown указатели vptr из классов, которые не наследуют ни одному интерфейсу СОМ.
Правила IUnknown в совокупности определяют, что значит быть объектом СОМ. Чтобы понять правила IUnknown, полезно начать с конкретного примера. Рассмотрим следующую иерархию интерфейсов:
import «unknwn.idl»;
[object, uuid(CD538340-A56D-11d0-8C2F-0080C73925BA)]
interface IVehicle : IUnknown {
HRESULT GetMaxSpeed([out, retval] long *pMax); }
[object, uuid(CD53834l-A56D-11d0-8C2F-0080C73925BA)]
interface ICar : IVehicle {
HRESULT Brake(void); }
[object, uuid(CD538342-A56D-11d0-8C2F-0080C73925BA)]
interface IPlane : IVehicle {
HRESULT TakeOff(void); }
[object, uuid(CD538343-A56D-11d0-8C2F-0080C73925BA)]
interface IBoat : IVehicle {
HRESULT Sink(void); }
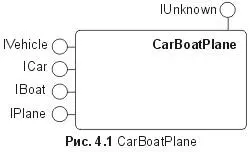
СОМ использует стандартную технологию для визуального представления объектов. Эта технология находится в рамках принципа СОМ отделения интерфейса от реализации и не раскрывает никаких деталей реализации объекта, кроме списка выставляемых им интерфейсов. Эта технология также визуально усиливает многие из правил IUnknown . Рисунок 4.1 показывает стандартное представление класса CarBoatPlane , который реализует все только что определенные интерфейсы. Заметим, что единственный вывод, который можно сделать из этого рисунка, таков: если не произойдет катастрофического сбоя, объекты CarBoatPlane будут выставлять пять интерфейсов: IBoat , IPlane , ICar , IVehicle и IUnknown .
Первое правило IUnknown , подлежащее исследованию, – это требование, чтобы QueryInterface был симметричным, транзитивным и рефлексивным ( Symmetric/Transitive/Reflexive ). Эти требования определяют отношения между всеми интерфейсными указателями объекта и начинают определять понятие идентификации ( identity ) объектов СОМ. Подобно всем правилам IUnknown , эти требования должны исполняться всегда, за исключением катастрофических сбоев , теми, кто хочет считаться действительным объектом СОМ.
QueryInterface симметрична
Спецификация СОМ требует, чтобы, если запрос QueryInterface на интерфейс B удовлетворяется через интерфейсный указатель типа A , то запрос QueryInterface на интерфейс A того же самого объекта через результирующий интерфейсный указатель типа В всегда был успешным. Это значит, что если верно QI(A)->B, то также должно быть верным QI(QI(A)->B)->A
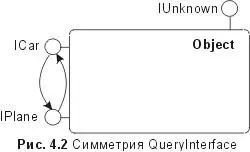
Из свойства, показанного на рис. 4.2, следует, что утверждение, заключенное в следующем коде, всегда должно быть истинным:
void AssertSymmetric(ICar *pCar) { if (pCar)
{
IPlane *pPlane = 0;
// request a second type of interface
// запрашиваем второй тип интерфейса
HRESULT hr = pCar->QueryInterface(IID_IPlane, (void**)&pPlane);
if (SUCCEEDED(hr)) { ICar *pCar2 = 0;
// request original type of interface
// запрашиваем исходный тип интерфейса
hr = pPlane->QueryInterface(IID_ICar, (void**)&pCar2);
// if the following assertion fails, pCar
// did not point to a valid СОМ object
// если следующее утверждение не будет правильным,
// то pCar не укажет на правильный СОМ-объект
assert(SUCCEEDED(hr));
pCar2->Release();
}
pPlane->Release();
}
}
Симметричность QueryInterface означает , что клиенты не должны заботиться о том, какой из интерфейсов запрашивать первым, так как любые два типа интерфейсов могут быть запрошены в любом порядке.
QueryInterface транзитивна
Спецификация СОМ требует также, чтобы, если запрос QueryInterface на интерфейс В удовлетворяется через интерфейсный указатель типа A , а второй запрос QueryInterface на интерфейс C удовлетворяется через указатель типа В , то запрос QueryInterface на интерфейс C через исходный указатель типа A был бы также успешным. Это означает, что если верно QI(QI(A)->B)->C, то должно быть верным и QI(A)->C
Это условие иллюстрируется рис. 4.3 и означает, что утверждение, приведенное в нижеследующем коде, должно всегда быть верным:
void AssertTransitive(ICar *pCar)
{
if (pCar)
{
IPlane *pPlane = 0;
// request intermediate type of interface
// запрос промежуточного типа интерфейса
HRESULT hr = pCar->QueryInterface(IID_IPlane, (void**)&pPlane);
if (SUCCEEDED(hr))
{
IBoat *pBoat1 = 0;
// request terminal type of interface
// запрос конечного типа интерфейса
hr = pPlane->QueryInterface(IID_IBoat, (void**)&pBoat1);
if (SUCCEEDED(hr))
{
IBoat *pBoat2 = 0;
// request terminal type through the original pointer
// запрос конечного типа через исходный указатель
hr = pCar->QueryInterface(IID_IBoat, (void**)&pBoat2);
// if the following assertion fails, pCar
// did not point to a valid СОМ object
// если следующее утверждение неверно, то pCar
// не указывал на корректный СОМ-объект
assert(SUCCEEDED(hr));
pBoat2->Release();
}
pBoat1->Release();
}
pPlane->Release();
}
}
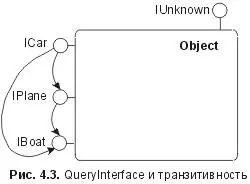
Из транзитивности QueryInterface следует, что все интерфейсы, которые выставляет объект, равноправны и не требуют, чтобы их вызывали в какой-то определенной последовательности. Если бы это было не так, то клиентам пришлось бы заботиться о том, какой указатель на объект использовать для различных запросов QueryInterface . Из транзитивности и симметричности QueryInterface следует, что любой интерфейсный указатель на объект выдаст тот же самый ответ «да/нет» на любой запрос QueryInterface . Единственная ситуация, не охватываемая транзитивностью и симметричностью, это повторные запросы одного и того же интерфейса. Эта ситуация требует, чтобы QueryInterface был и рефлективным.
Читать дальшеИнтервал:
Закладка: