Дональд Бокс - Сущность технологии СОМ. Библиотека программиста

- Название:Сущность технологии СОМ. Библиотека программиста
- Автор:
- Жанр:
- Издательство:Питер
- Год:2001
- Город:СПб
- ISBN:5-318-00058-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Дональд Бокс - Сущность технологии СОМ. Библиотека программиста краткое содержание
В этой книге СОМ исследуется с точки зрения разработчика C++. Написанная ведущим специалистом по модели компонентных объектов СОМ, она раскрывает сущность СОМ, помогая разработчикам правильно понять не только методы модели программирования СОМ, но и ее основу. Понимание мотивов создания СОМ и ее аспектов, касающихся распределенных систем, чрезвычайно важно для тех разработчиков, которые желают пойти дальше простейших приложений СОМ и стать по-настоящему эффективными СОМ-программистами. Показывая, почему СОМ для распределенных систем (Distributed СОМ) работает именно так, а не иначе, Дон Бокс дает вам возможность применять эту модель творчески и эффективно для ежедневных задач программирования.
Сущность технологии СОМ. Библиотека программиста - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Возможно, это вполне разумное поведение для большого числа реализации. Но что если объекту нужно было вернуть другую максимальную скорость, зависящую от интерфейса, на который был сделан запрос? Поскольку имя и сигнатуры одинаковы, то необходимо принимать неординарные меры для разрешения множественных реализации конфликтного метода. Один из возможных способов состоит в создании промежуточного класса C++, производного от интерфейса и реализующего конфликтный метод путем создания чисто виртуального вызова неконфликтного имени:
struct IXCar : public ICar {
// add new non-clashing method as pure virtual
// добавляем новый неконфликтный метод как чисто виртуальный
virtual HRESULT STDMETHODCALLTYPE GetMaxCarSpeed(long *pval) = 0;
// implement clashing method by upcalling
// non-clashing implementation in derived class
// реализуем конфликтный метод путем вызова
// неконфликтной реализации в производном классе
STDMETHODIMP GetMaxSpeed(long *pval)
{ return GetMaxCarSpeed(pval); }
};
Допуская, что интерфейсы IBoat и IPlane подвергнуты подобной операции, можно реализовывать различные версии GetMaxSpeed простым наследованием от расширенных версий интерфейсов и переопределением неконфликтных версий каждого метода GetMaxSpeed :
class CarBoatPlane: public IXCar, public IXBoat, public IXPlane
{
public:
// Unknown methods – методы IUnknown
STDMETHODIMP QueryInterface(REFIID, void**);
STDMETHODIMP_(ULONG) AddRef(void);
STDMETHODIMP_(ULONG) Release(void);
// IVehicle methods – методы IVehicle
// do not override GetMaxSpeed!
// не подменяем GetMaxSpeed!
// ICar methods – методы ICar
STDMETHODIMP Brake(void);
// IBoat methods – методы IBoat
STDMETHODIMP Sink(void);
// IXPlane methods – методы IXPlane
STDMETHODIMP TakeOff(void);
// upcalled from IXCar::GetMaxSpeed
// вызвано из IXCar::GetMaxSpeed
STDMETHODIMP GetMaxCarSpeed(long *pval);
// upcalled from IXBoat::GetMaxSpeed
// вызвано из IXBoat::GetMaxSpeed
STDMETHODIMP GetMaxBoatSpeed(long *pval);
// called from IXPlane::GetMaxSpeed
// вызвано из IXPlane::GetMaxSpeed
STDMETHODIMP GetMaxPlaneSpeed(long *pval);
}
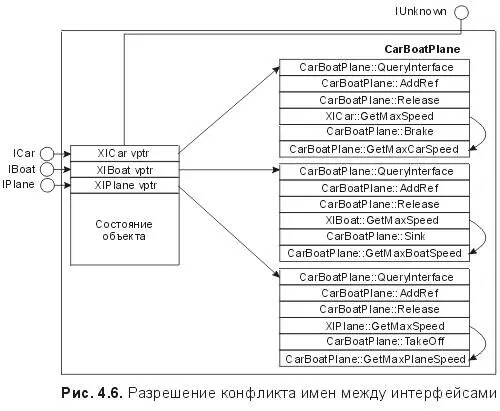
Рисунок 4.6 иллюстрирует представление этого класса и форматы таблиц vtbl . Отметим, что конфликтный метод GetMaxSpeed не реализован в этом классе. Поскольку каждый из базовых классов CarBoatPlane подменяет этот чисто виртуальный метод, то CarBoatPlane не нуждается в создании своей собственной реализации. Действительно, если бы в CarBoatPlane нужно было подменить GetMaxSpeed , то одна его реализация этого метода подменила бы версии, вызываемые из каждого базового класса, аннулировав результат использования IXCar , IXBoat и IXPlane . В силу этой проблемы данная технология годится только в тех ситуациях, когда можно быть уверенным, что класс реализации (или любые возможные производные классы) никогда не станет подменять конфликтный метод.
Другой способ обеспечения множественных реализации конфликтных методов состоит в том, чтобы усилить правила IUnknown . Спецификация СОМ не требует, чтобы объект был реализован как класс C++. Хотя существует весьма естественное соответствие между объектами СОМ и классами C++, базирующимися на множественном наследовании, это всего лишь одна из возможных технологий реализации. Для создания объекта СОМ может быть использована любая программная технология, производящая таблицы vtbl в нужном формате и удовлетворяющая правилам СОМ для QueryInterface . Один стандартный метод разрешения конфликтов имен состоит в реализации интерфейсов с конфликтующими именами как отдельных классов C++ и последующей компоновке целевого класса C++ из экземпляров этих отдельных классов. Для гарантии того, что каждый из этих составных элементов данных появится во внешнем мире как единый объект СОМ, часто назначается одна главная реализация QueryInterface , которой каждый составной элемент данных будет передавать функции. Следующий код демонстрирует эту технологию:
class CarPlane
{
LONG m_cRef;
CarPlane(void) : m_cRef(0) {}
public:
// Main IUnknown methods
// Главные методы IUnknown
STDMETHODIMP QueryInterface(REFIID, void**);
STDMETHODIMP_(ULONG) AddRef(void);
STDMETHODIMP_(ULONG) Release(void);
private:
// define nested class that implements ICar
// определяем вложенный класс, реализующий
ICar struct XCar : public ICar
{
// get back pointer to main object
// получаем обратный указатель на главный объект
inline CarPlane* This();
STDMETHODIMP QueryInterface(REFIID, void**);
STDMETHODIMP_(ULONG) AddRef(void);
STDMETHODIMP_(ULONG) Release(void);
STDMETHODIMP GetMaxSpeed(long *pval);
STDMETHODIMP Brake(void);
};
// define nested class that implements IPlane
// определяем вложенный класс, реализующий IPlane
struct XPlane : public IPlane {
// Get back pointer to main object
// получаем обратный указатель на главный объект
inline CarPlane* This();
STDMETHODIMP QueryInterface(REFIID, void**);
STDMETHODIMP_(ULONG) AddRef(void);
STDMETHODIMP_(ULONG) Release(void);
STDMETHODIMP GetMaxSpeed(long *pval);
STDMETHODIMP TakeOff(void);
};
// declare instances of nested classes
// объявляем экземпляры вложенных классов
XCar m_xCar;
XPlane m_xPlane;
};
Использование вложенных классов не является обязательным, но оно подчеркивает, что эти подчиненные классы не имеют смысла вне контекста класса CarPlane . Рисунок 4.7 показывает двоичное размещение этого класса и размещения соответствующих vtbl .
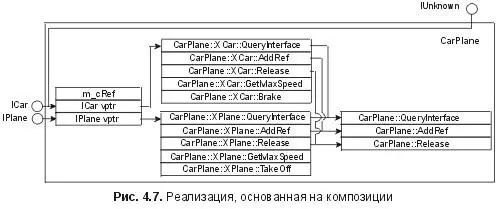
Отметим, что имеется два определения вложенного класса, по одному для каждого реализованного им интерфейса. Это позволяет разработчику объекта обеспечить две различных реализации GetMaxSpeed :
STDMETHODIMP CarPlane::XCar::GetMaxSpeed(long *pn) {
// set *pn to max speed for cars
// устанавливаем *pn для максимальной скорости автомобилей
}
STDMETHODIMP CarPlane::XPlane::GetMaxSpeed(long *pn) {
// set *pn to max speed for planes
// устанавливаем *pn для максимальной скорости самолетов
}
Тот факт, что две реализации GetMaxSpeed встречаются в различных определениях вложенных классов, позволяет определить метод дважды и к тому же гарантирует то, что таблицы vtbl , соответствующие ICar и IPlane , будут иметь различные элементы для GetMaxSpeed .
Необходимо также отметить, что хотя класс CarPlane , находящийся на верхнем уровне, реализует методы IUnknown , он не наследует никакому производному от IUnknown классу. Вместо этого объекты CarPlane имеют элементы данных, которые наследуют интерфейсам СОМ. Это значит, что вместо того, чтобы использовать static_cast для вхождения в объект и нахождения определенного указателя vptr , реализация QueryInterface в CarPlane должна возвратить указатель на тот элемент данных, который реализует запрашиваемый интерфейс:
STDMETHODIMP CarPlane::QueryInterface(REFIID riid, void **ppv)
{
if (riid == IID_IUnknown) *ppv = static_cast(&m_xCar);
else if (riid == IID_IVehicle) *ppv = static_cast (&m_xCar);
else if (riid == IID_ICar) *ppv = static_cast(&m_xCar);
else if (riid == IID_IPlane) *ppv = static_cast(&m_xPlane);
else return (*ppv = 0), E_NOINTERFACE;
((IUnknown*)(*ppv))->AddRef();
return S_OK;
}
Для обеспечения идентификации объекта каждый из элементов данных CarPlane должен или воспроизвести этот код в своей собственной реализации QueryInterface , или просто передать управление главной функции QueryInterface в CarPlane . Чтобы осуществить это, необходим механизм перехода к главному объекту со стороны функции-члена составного элемента данных. Определение класса CarPlane::XCar содержит встроенную подпрограмму, которая использует фиксированные смещения для вычисления указателя this главного объекта от указателя this составного элемента данных.
Читать дальшеИнтервал:
Закладка: