Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С

- Название:Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
- Автор:
- Жанр:
- Издательство:Издательский дом «ДМК-пресс»
- Год:2007
- Город:Москва
- ISBN:5-9706-0034-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С краткое содержание
В книге последовательно рассматриваются все этапы создания встраиваемых систем на микроконтроллерах с применением современных технологий проектирования. Задумав эту книгу, авторы поставили перед собой задачу научить читателя искусству создания реальных устройств управления на однокристальных микроконтроллерах.
Издание содержит материал, охватывающий все вопросы проектирования, включает множество заданий для самостоятельной работы, примеры программирования, примеры аппаратных решений и эксперименты по исследованию работы различных подсистем микроконтроллеров.
Данная книга является прекрасным учебным пособием для студентов старших курсов технических университетов, которые предполагают связать свою профессиональную деятельность с проектированием и внедрением встраиваемых микропроцессорных систем. Книга также будет полезна разработчикам радиоэлектронной аппаратуры на микроконтроллерах.
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Мы начнем этот раздел, с получения хорошего описания того, что мы понимаем под задачей и как мы представляем ее в программе. Затем мы исследуем, как следить за состоянием каждой задачи и модифицировать его, используя блок управления задачами (task control block — TCB). Мы исследуем также, как отслеживается состояние другой системой информации, с помощью управляющих блоков устройства. Мы увидим, как диспетчер следит за состоянием всех задач и определяет, какая из задач является очередной. В заключение, мы также исследуем различные алгоритмы планирования, которые могут использоваться в ОСРВ.
8.4.1. Что такое задача?
Задача — это независимое, асинхронное действие, которое выполняется системой ОСРВ. Поскольку задачи асинхронны, мы не можем точно предугадать момент, когда они будут выполняться программой. Каждая задача может рассматриваться как маленькая, независимая программа, которая выполняет специфическое действие. Так как мы имеем несколько задач, конкурирующих за использование одного и того же процессора, задача должна иметь возможность сохранить контекст (ключевые значения регистров, счетчик программы, и т.д.). Эта информация резервируется на интервале выполнения другой задачи. Следовательно, каждая задача должна иметь свой стек для сохранения контекста. Даже если выполнение задачи прервано другой задачей, в конечном счете, его планируется завершить позднее.
В нескольких следующих разделах мы исследуем возможные состояния задач и способы, с помощью которых вся информация о задачах обрабатывается блоком управления задачами. До перехода к этому материалу рассмотрим предварительно задачи, связанные со знакомым уже нам роботом, проходящим через лабиринт.
Пример:В главе 7 был рассмотрен проект автономного робота, проходящего через неизвестный лабиринт. Этот робот, обнаруживая границы лабиринта с помощью инфракрасных локаторов, принимал решения, двигаться ли вперед или повернуть в необходимом направлении, чтобы пройти через лабиринт. При проходе через лабиринт робот должен был избежать земляных мин (магнитов в полу лабиринта). Как мы говорили, робот должен находить мины с помощью датчика Холла. Если робот обнаруживал магнит, он должен был остановиться, отъехать назад, и объехать мину. Робот был также оборудован ЖК дисплея (ЖКД), показывающим его текущее состояние в процессе выполнения программы.
Создадим список функций, которые должна выполнять операционная система робота, чтобы успешно выполнять все перечисленные задачи:
• Функции инициализации ЖКД, ATD-преобразователя и системы широтно-импульсной модуляции (ШИМ);
• ATD-преобразование выходных сигналов ИК датчиков;
• Сравнение выходных сигналов ИК датчика с пороговыми уровнями обнаружения стенки;
• Алгоритм поворотов робота, позволяющий правильно изменить движение робота в ответ на выходные сигналы ИК датчиков;
• Функции, позволяющие осуществить поворот робота направо, налево и продолжить движение вперед;
• Метод обработки выходного сигнала датчика Холла;
• Функции, необходимые для выполнения объезда мины — остановка, задний ход, и объезд;
• Функции, обеспечивающие работу ЖКД.
Эти функции показаны в структуре программы (рис.8.13).
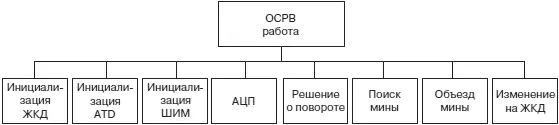
Рис. 8.13.Структура программы, управляющей роботом, проходящим лабиринт
При реализации ОСРВ робота эти функции становятся задачами. Как мы уже сказали, задачами называются независимые, асинхронные и взаимодействующие процессы, соревнующиеся за предоставление процессорного времени. Исследуем сценарий работы системы управления роботом, чтобы иллюстрировать это.
Сценарий.Робот помещается в начальную точку неизвестного лабиринта, содержащего магнитные мины. Операционная система инициализирует ЖКД, ATD-конвертер и систему ШИМ. В главе 4, мы обсуждали требования инициализации для каждой из этих систем робота.
Как только инициализация закончена, робот начинает проход через неизвестный лабиринт, обрабатывая сигналы ИК датчиков и датчика Холла. Что получается, если робот получит сигналы о приближении к стенке одновременно с сигналом об обнаружении мины? Робот не сможет обрабатывать оба эти два события одновременно, поскольку располагает только одним процессором. Оба события являются критическими, хотя и не в равной степени. Если мы обрабатываем сначала информацию о стенках, робот избегает столкновения, но рискует подорваться на мине, если обработка информации о стенках не закончится достаточно быстро. С другой стороны, если мы сначала обрабатываем информацию о минах, считая эту задачу более приоритетной, мы подвергаемся риску возможного столкновения со стенками. К тому же оба события взаимосвязаны. Мы не хотим подорваться на мине, обрабатывая информацию о стенках, но и не хотим наткнуться на стенки объезжая мины.
В следующих разделах мы обсудим, как решить рассматриваемые проблемы, используя ОСРВ и, прежде всего, познакомимся с концепциями управления задачами.
8.4.2. Управление задачами
В этом разделе мы рассмотрим, как ОСРВ взаимодействует с отдельной задачей. Сначала мы рассмотрим различные состояния, в которых может находиться задача. Затем исследуем, как задачи переходят из одного состояния в другое, и рассмотрим программную функцию, позволяющую моделировать состояния задач и их связь друг с другом. Это обсуждение будет частью полного обсуждения блока управления задачами.
Состояния задачи.В любой момент времени задача может быть только в одном определенном состоянии. Различные состояния задачи показаны на рис. 8.14. ОСРВ должна отслеживать и изменять состояние каждой задачи. Не забудем при этом, что все задачи независимы, асинхронны и претендуют на процессорное время. ОСРВ должна обеспечить эффективное планирование этого дефицитного ресурса.
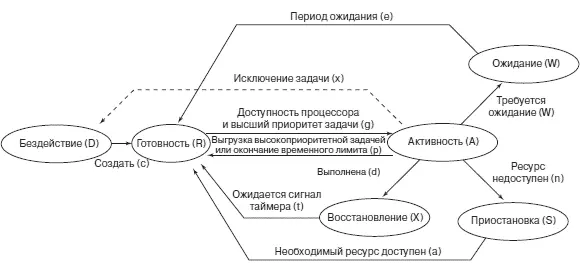
Рис. 8.14.Состояния задач
Задача находится в одном из следующих состояний:
• Бездействия (Dormant — D): задача не нуждается в обработке и не требует процессорного времени. Она рассматривается как удаленная или неактивная задача, и по сигналу операционной системы переходит в состояние готовности.
• Готовности (Ready — R): задача полностью готова к переходу в активное состояние; однако, в настоящее время процессор занят другой задачей. Задача может переходить в состояние готовности из состояний бездействия или активности. Она переходит от активного состояния в состояние готовности, когда процессор обрабатывает другую более приоритетную задачу. Зарезервированная задача с более низким приоритетом (находящаяся в состоянии готовности) повторно переходит в активное состояние, как только становится доступным процессорное время и операционной системой дается разрешение на выполнение.
Читать дальшеИнтервал:
Закладка: