Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С

- Название:Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
- Автор:
- Жанр:
- Издательство:Издательский дом «ДМК-пресс»
- Год:2007
- Город:Москва
- ISBN:5-9706-0034-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С краткое содержание
В книге последовательно рассматриваются все этапы создания встраиваемых систем на микроконтроллерах с применением современных технологий проектирования. Задумав эту книгу, авторы поставили перед собой задачу научить читателя искусству создания реальных устройств управления на однокристальных микроконтроллерах.
Издание содержит материал, охватывающий все вопросы проектирования, включает множество заданий для самостоятельной работы, примеры программирования, примеры аппаратных решений и эксперименты по исследованию работы различных подсистем микроконтроллеров.
Данная книга является прекрасным учебным пособием для студентов старших курсов технических университетов, которые предполагают связать свою профессиональную деятельность с проектированием и внедрением встраиваемых микропроцессорных систем. Книга также будет полезна разработчикам радиоэлектронной аппаратуры на микроконтроллерах.
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
• Модуль сторожевого таймера COP (Computer Operating Properly). Встраиваемая микропроцессорная система должна обладать высокой надежностью. Одним из путей повышения этой надежности является свойство самовосстановления системы при возникающих некатострофических отказах. Такими отказами являются нарушения исполнения прикладной программы, вызванные помехами, и не сопровождаемые отказом аппаратных средств МК. Для восстановления правильного хода исполнения прикладной программы используется механизм сторожевого таймера. Если программа исполняется без нарушений, то сторожевой таймер регулярно обнуляется (сбрасывается) под управлением этой программы. Если же ход исполнения программы нарушен, то своевременный сброс может не произойти, и сторожевой таймер переполнится. Переполнение вызовет состояние внутреннего сброса МК, в результате исполнение прикладной программы будет начато заново, т.е. правильный ход исполнения программы будет восстановлен. В главе 5 мы обсудим возможные источники помех и шумов, которые могут вызвать сбой в исполнении программы. В главе 6 поговорим о дополнительных программных мерах, которые следует предпринять для предупреждения подобных отказов.
• Модуль широтно-импульсного модулятора PWM (Pulse Width Modulation). Широтно-импульсная модуляция (ШИМ) — один из способов формирования импульсного сигнала с регулируемыми временными характеристиками. Способ широтно-импульсной модуляции часто используется для регулирования скорости вращения двигателей постоянного тока, а также для управления электрическими двигателями других типов. Для генерации ШИМ-сигнала в МК B32 могут быть использованы аппаратные средства модуля многофункционального таймера TIM. Однако МК B32 оснащен специальным модулем ШИМ. Этот модуль позволяет генерировать четыре независимых импульсных последовательности с 8 разрядным разрешением для задания коэффициента заполнения, или две импульсные последовательности с 16-разрядным заданием коэффициента заполнения. Допускается комбинация этих режимов. Например, ШИМ сигнал используется для управления двигателем рулевого управления в игрушечных радиоуправляемых машинках. Для того, чтобы машинка повернула направо или налево, она должна получить импульсный сигнал, у которого частота следования импульсов постоянная, а длительность импульсов изменяется, как показано на рис. 4.2. Отношение длительности импульса к длительности периода сигнала называется коэффициентом заполнения. Машинка повернет налево, если коэффициент заполнения менее 50% , или направо, если коэффициент заполнения превышает 50%. Модуль PWM микроконтроллера B32 позволяет организовать импульсную последовательность с требуемыми значениями периода следования и коэффициента заполнения при использовании минимального числа команд прикладной программы.
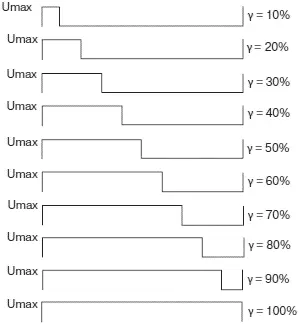
а) Временные диаграммы ШИМ-сигналов с различными коэффициентами заполнения
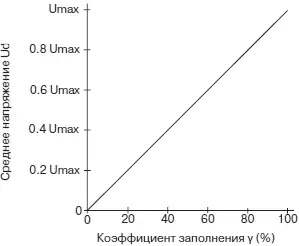
б) Регулировочная характеристика
Рис. 4.2.Широтно-импульсная модуляция
• Модуль контроллера последовательного обмена BDLC (Byte Data Link Communication) поддерживает коммуникационный протокол SAE J1850, который является действующим стандартом бортовой информационной сети в автомобилях североамериканского производства.
• Модуль контроллера CAN интерфейса msCAN12 (Motorola Scalable Controller Area Network) содержит в себе набор аппаратных средств для поддержки коммуникационного протокола промышленных сетей в стандарте CAN 2.0 A/B. Этого модуля нет в составе МК модели B32, однако он присутствует во многих других моделях семейства HC12 и HCS12. Пример работы с этим модулем приведен в главе 9.
Для более полного восприятия структуры МК B32 мы дополним приведенные технические характеристики небольшим примером применения.
На рис. 4.3. представлена микропроцессорная система регулирования скорости электрического двигателя на основе МК семейства 68HC12. Желаемая скорость вращения двигателя (число оборотов в секунду — об/с) задается посредством шестнадцатикнопочной клавиатуры. МК 68HC12 осуществляет преобразование вводимых с клавиатуры кодов в ШИМ сигнал для управления двигателем. Информация о скорости вращения двигателя снимается с выхода оптического импульсного датчика, установленного на валу двигателя. Измеренное значение скорости используется для вычисления коэффициента заполнения ШИМ сигнала, который управляет подключением силового напряжения к обмотке двигателя. Регулирование коэффициента заполнения ШИМ сигнала позволяет поддерживать скорость вращения двигателя на заданном уровне. Текущая скорость двигателя отображается на жидкокристаллическом (ЖК) индикаторе.
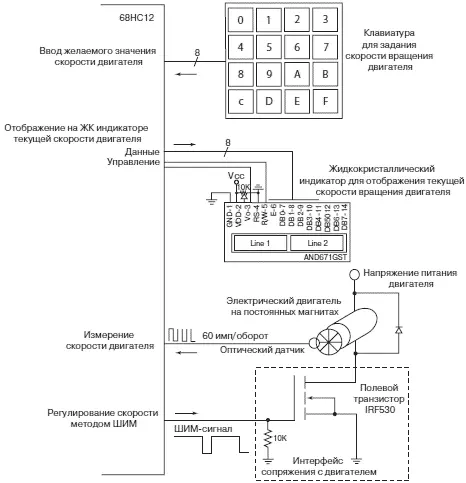
Рис. 4.3.Система управления электрическим двигателем на основе МК 68HC12
Вопрос: какие подсистемы МК семейства 68HC12 используются для реализации рассмотренной системы регулирования скорости вращения двигателя?
Ответ:
• Параллельный порт задействован для ввода сигналов с клавиатуры.
• Модуль ШИМ используется для генерации широтно-модулированного сигнала управления силовым ключом IRF530. Этот ключ коммутирует силовое напряжение к обмотке двигателя. Если в примере использовать МК семейства 68HC12, который не имеет в своем составе модуля ШИМ, например A4, то этот же сигнал может быть сгенерирован одним из каналов многофункционального таймера в режиме выходного сравнения OC.
• Выход оптического импульсного датчика подключается на вход счетчика внешних событий PA. Внешний датчик и встроенный в МК счетчик вместе образуют цепь обратной связи системы управления скоростью вращения двигателя.
• Модуль меток реального времени RTI реализует периодические прерывания для считывания накопленного в счетчике внешних событий числа импульсов. Это значение используется для вычисления реальной скорости вращения двигателя.
• Параллельный порт и несколько дополнительных линий другого порта используются для вывода информации на ЖК индикатор.
4.2. Аппаратные средства МК семейства HCS12
Новое семейство МК HCS12 унаследовало архитектуру процессорного ядра и большинства периферийных модулей от своего предшественника, семейства 68HC12. Каковы основные отличия МК нового семейства HCS12 от изученных представителей 68HC12?
• Напряжение питания большинства моделей МК семейства HCS12 равно 5,0 В, что позволяет обеспечить электромагнитную совместимость в автомобильных и общепромышленных применениях.
Читать дальшеИнтервал:
Закладка: