Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С

- Название:Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С
- Автор:
- Жанр:
- Издательство:Издательский дом «ДМК-пресс»
- Год:2007
- Город:Москва
- ISBN:5-9706-0034-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Стивен Барретт - Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С краткое содержание
В книге последовательно рассматриваются все этапы создания встраиваемых систем на микроконтроллерах с применением современных технологий проектирования. Задумав эту книгу, авторы поставили перед собой задачу научить читателя искусству создания реальных устройств управления на однокристальных микроконтроллерах.
Издание содержит материал, охватывающий все вопросы проектирования, включает множество заданий для самостоятельной работы, примеры программирования, примеры аппаратных решений и эксперименты по исследованию работы различных подсистем микроконтроллеров.
Данная книга является прекрасным учебным пособием для студентов старших курсов технических университетов, которые предполагают связать свою профессиональную деятельность с проектированием и внедрением встраиваемых микропроцессорных систем. Книга также будет полезна разработчикам радиоэлектронной аппаратуры на микроконтроллерах.
Встраиваемые системы. Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Бит PTAE разрешает работу подсистемы счетчика событий. При PTAE = 1 работа подсистемы разрешена, при PTAE = 0 подсистема счетчика находится в неактивном состоянии. Бит PAMOD служит для выбора режима работы. При PAMOD = 0 подсистема работает в режиме счетчика внешних событий, при PAMOD = 1 для подсистемы назначается режим стробируемого таймера.
Бит PEDGE управляет режимом работы детектора событий подсистемы счетчика. Если счетчик работает в режиме счетчика внешних событий (PAMOD = 0), то при PEDGE = 1 детектор события настраивается на распознавание положительного фронта сигнала, при PEDGE = 0 — отрицательного фронта. При работе в режиме стробируемого таймера (PAMOD = 1) бит PEDGE определяет вид сигнала, разрешающего переключение счетчика таймера. Если PEDGE = 1, то счет разрешается при подаче 1 на вход PAI, при этом флаг PAI устанавливается по отрицательному фронту входного сигнала. Если же PEDGE = 0, то счет разрешается при подаче 0 на вход PAI, при этом флаг PAI устанавливается по положительному фронту входного сигнала.
Биты CLK1:CLK0 назначают источник тактирования для счетчика временной базы модуля таймера (см. рис. 4.27).
Биты PAOVI и PAI (не путать с одноименным входом) разрешают прерывания по событию переполнения счетчика (флаг PAOVF) и по событию на входе PAI (флаг PAIF), тип которого определяется режимом работы и значением бита PEDGE.
Регистр флагов счетчика событий PAFLG (Pulse Accumulator Flag Register) располагается в памяти МК по адресу $00A1 и содержит всего два значимых бита (рис. 4.45). Флаг переполнения счетчика устанавливается, когда 16-разрядный счетчик подсистемы изменяет свое значение с $FFFF на $0000. Флаг события подсистемы PAIF устанавливается в 1 при каждом перепаде потенциала на входе PAI, который указан битом PEDGE и режимом работы счетчика. Оба этих бита сбрасываются посредством записи в установленный бит 1.
Регистр счетчика PACNT (Pulse Accumulator Counter Register) содержит текущий код 16-разрядного счетчика подсистемы. Поэтому он располагается в двух ячейках памяти: старший байт PACNTH — по адресу $00A2, младший байт PACNTL — по адресу $00A3. Поскольку изменение кода счетчика может произойти в произвольный момент времени, рекомендуется производить его чтение в двухбайтовом формата с использованием типа LDD или LDX/LDY.
Мы рассмотрим пример определения скорости движения велосипеда по сигналам датчика Холла, который установлен на колесе велосипеда. Датчики Холла доступны в различных модификациях. Обобщая сведения о датчиках Холла, можно выделить следующие три типа датчиков:
• Линейные датчики, напряжение на выходе которых пропорционально напряженности магнитного поля, в которое помещен датчик;
• Биполярные датчики, формируют выходной сигнал, находясь вблизи южного магнитного полюса, сбрасываются в 0, находясь вблизи северного магнитного полюса;
• Однополярные датчики, формируют выходной сигнал, находясь вблизи южного магнитного полюса, сбрасываются в 0 при отсутствии магнитного поля.
В нашем примере мы поместим магнит на спицу вращающегося колеса. Однополярный датчик Холла установим на вилке колеса, выход датчика соединим со входом (PT7) счетчика внешних событий МК семейства 68HC12 (рис. 4.46). Тогда на выходе датчика будет генерироваться один импульс при каждом полном обороте колеса. Если мы подсчитаем число импульсов с выхода датчика на известном временном интервале, мы сможем определить скорость движения и расстояние, которое было преодолено за время измерения.

Рис. 4.46. Колесо велосипеда с датчиком Холла
Читателю предлагается самостоятельно написать программу расчета скорости и преодоленного расстояния, используя следующие подсказки:
• В первую очередь определите связь между одним оборотом колеса и пройденной дистанцией пути. Предположите, что диаметр колеса равен 66,04 см (26 дюймов).
• Произведите инициализацию подсистемы счетчика внешних событий:
a. Подсистема счетчика событий использует вход PT7 для подключения внешнего импульсного сигнала. Для конфигурирования линии PT7 на ввод установите бит 7 регистра TIOS в 0, также в 0 должны быть установлены биты 6 и 7 регистра PCTL1.
b. Запрограммируйте на выбранный режим регистр управления счетчиком событий PACTL. Определите необходимое состояние каждого бита самостоятельно.
• Считайте под управлением программы текущее состояние счетчика внешних событий, используя регистр PACNT.
• Сформируйте временной интервал, длительность которого должна быть достаточна накопления в счетчике событий нескольких десятков отсчетов. Тогда точность измерения скорости будет приемлемой (несколько единиц %).
• Считайте под управлением программы новое текущее состояние счетчика событий.
• Получите разность кодов и вычислите скорость и пройденное расстояние. Приведенный ниже программный фрагмент поможет Вам выполнить инициализацию подсистемы счетчика событий.
/*------------------------------------------------------------------------------*/
/* Функция initialize_PA задает начальные установки подсистемы счетчика событий */
/*------------------------------------------------------------------------------*/
void initialize_PA(void) {
TIOS = 0x00; /*конфигурировать вход PT7 для работы */
TCTL1 = 0х00; /*в качестве источника сигналов для счетчика*/
OC7M = 0x00 /*внешних событий – 3 команды*/
TSCR = 0х80; /*разрешить работу всего модуля таймера*/
PACTL = 0х70; /*разрешить работу в режиме счетчика внешних*/
/*событий по положительному фронту сигнала*/
}
/*-------------------------------------------------------------------------------*/
4.15. Модуль меток реального времени
Многие применения требуют организации выполнения одного и того же фрагмента программы через равные интервалы времени. Для удобства разработчиков МК семейства 68HC12/HCS12 оснащены специальным модулем меток реального времени RTI (Real Time Interrupt), который генерирует равноотстоящие во времени запросы на прерывание (рис. 4.47). Тогда фрагмент программы, которые должен исполняться через равные интервалы времени, может быть оформлен как подпрограмма прерывания по запросу RTI. И желаемый алгоритм функционирования устройства будет реализован.
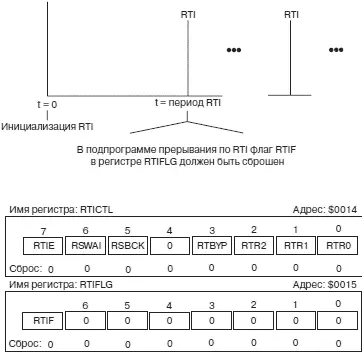
Рис. 4.47. Временная диаграмма, поясняющая принцип действия модуля меток реального времени, и регистры управления модулем
Модуль меток реального времени RTI использует два регистра специальных функций: регистр управления RTICTL (Real Time Interrupt Control Register) и регистр флагов RTIFLG (Real Time Interrupt Flag Register).
Читать дальшеИнтервал:
Закладка: