Иван Братко - Программирование на языке Пролог для искусственного интеллекта

- Название:Программирование на языке Пролог для искусственного интеллекта
- Автор:
- Жанр:
- Издательство:Мир
- Год:1990
- Город:Москва
- ISBN:5-03-001425-Х
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Иван Братко - Программирование на языке Пролог для искусственного интеллекта краткое содержание
Книга известного специалиста по программированию (Югославия), содержащая основы языка Пролог и его приложения для решения задач искусственного интеллекта. Изложение отличается методическими достоинствами — книга написана в хорошем стиле, живым языком. Книга дополняет имеющуюся на русском языке литературу по языку Пролог.
Для программистов разной квалификации, специалистов по искусственному интеллекту, для всех изучающих программирование.
Программирование на языке Пролог для искусственного интеллекта - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
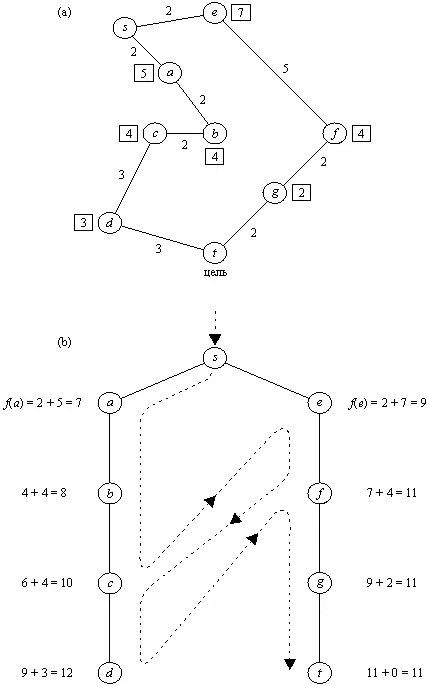
Рис. 12.2. Поиск кратчайшего маршрута из s в t . (а) Карта со связями между городами; связи помечены своими длинами; в квадратиках указаны расстояния по прямой до цели t . (b) Порядок, в котором при поиске с предпочтением происходит обход городов. Эвристические оценки основаны на расстояниях по прямой. Пунктирной линией показано переключение активности между альтернативными путями. Эта линия задает тот порядок, в котором вершины принимаются для продолжения пути, а не тот порядок, в котором они порождаются.
На рис. 12.2 показан пример поведения конкурирующих процессов. Дана карта, задача состоит в том, чтобы найти кратчайший маршрут из стартового города s в целевой город t . В качестве оценки стоимости остатка маршрута из города X до цели мы будем использовать расстояние по прямой расст( X, t) от X до t . Таким образом,
f( X) = g( X) + h( X) = g( X) + расст( X, t)
Мы можем считать, что в данном примере процесс поиска с предпочтением состоит из двух процессов. Каждый процесс прокладывает свой путь — один из двух альтернативных путей: Процесс 1 проходит через а . Процесс 2 — через e . Вначале Процесс 1 более активен, поскольку значения f вдоль выбранного им пути меньше, чем вдоль второго пути. Когда Процесс 1 достигает города с , а Процесс 2 все еще находится в e , ситуация меняется:
f( с) = g( c) + h( c) = 6 + 4 = 10
f( e) = g( e) + h( e) = 2 + 7 = 9
Поскольку f( e) < f( c) , Процесс 2 переходит к f , a Процесс 1 ждет. Однако
f( f) = 7 + 4 = 11
f( c) = 10
f( c) < f( f)
Поэтому Процесс 2 останавливается, а Процессу 1 дается разрешение продолжать движение, но только до d , так как f( d) = 12 > 11 . Происходит активация Процесса 2, после чего он, уже не прерываясь, доходит до цели t .
Мы реализуем этот механизм программно при помощи усовершенствования программы поиска в ширину (рис. 11.13). Множество путей-кандидатов представим деревом. Дерево будет изображаться в программе в виде терма, имеющего одну из двух форм:
(1) л( В, F/G) — дерево, состоящее из одной вершины (листа); В — вершина пространства состояний, G — g ( B) (стоимость уже найденного пути из стартовой вершины в В); F - f ( В) = G + h ( В).
(2) д( В, F/G, Пд) — дерево с непустыми поддеревьями; В — корень дерева, Пд — список поддеревьев; G — g ( B) ; F — уточненное значение f ( В) , т.е. значение f для наиболее перспективного преемника вершины В; список Пдупорядочен в порядке возрастания f -оценок поддеревьев.
Уточнение значения f необходимо для того, чтобы дать программе возможность распознавать наиболее перспективное поддерево (т.е. поддерево, содержащее наиболее перспективную концевую вершину) на любом уровне дерева поиска. Эта модификация f -оценок на самом деле приводит к обобщению, расширяющему область определения функции f . Теперь функция f определена не только на вершинах, но и на деревьях. Для одновершинных деревьев (листов) n остается первоначальное определение
f( n) = g( n) + h( n)
Для дерева T с корнем n , имеющем преемников m 1, m 2, …, получаем
Программа поиска с предпочтением, составленная в соответствии с приведенными выше общими соображениями, показана на рис 12.3. Ниже даются некоторые дополнительные пояснения.
Так же, как и в случае поиска в ширину (рис. 11.13), ключевую роль играет процедура расширить, имеющая на этот раз шесть аргументов:
расширить( Путь, Дер, Предел, Дер1, ЕстьРеш, Решение)
Эта процедура расширяет текущее (под)дерево, пока f -оценка остается равной либо меньшей, чем Предел.
% Поиск с предпочтением
эврпоиск( Старт, Решение) :-
макс_f( Fмакс). % Fмакс > любой f-оценки
расширить( [], л( Старт, 0/0), Fмакс, _, да, Решение).
расширить( П, л( В, _ ), _, _, да, [В | П] ) :-
цель( В).
расширить( П, л( В, F/G), Предел, Дер1, ЕстьРеш, Реш) :-
F <= Предел,
( bagof( B1/C, ( после( В, В1, С), not принадлежит( В1, П)),
Преемники), !,
преемспис( G, Преемники, ДД),
опт_f( ДД, F1),
расширить( П, д( В, F1/G, ДД), Предел, Дер1,
ЕстьРеш, Реш);
ЕстьРеш = никогда). % Нет преемников - тупик
расширить( П, д( В, F/G, [Д | ДД]), Предел, Дер1,
ЕстьРеш, Реш) :-
F <= Предел,
опт_f( ДД, OF), мин( Предел, OF, Предел1),
расширить( [В | П], Д, Предел1, Д1, ЕстьРеш1, Реш),
продолжить( П, д( В, F/G, [Д1, ДД]), Предел, Дер1,
ЕстьРеш1, ЕстьРеш, Реш).
расширить( _, д( _, _, []), _, _, никогда, _ ) :- !.
% Тупиковое дерево - нет решений
расширить( _, Дер, Предел, Дер, нет, _ ) :-
f( Дер, F), F > Предел. % Рост остановлен
продолжить( _, _, _, _, да, да, Реш).
продолжить( П, д( В, F/G, [Д1, ДД]), Предел, Дер1,
ЕстьРеш1, ЕстьРеш, Реш) :-
( ЕстьРеш1 = нет, встав( Д1, ДД, НДД);
ЕстьРеш1 = никогда, НДД = ДД),
опт_f( НДД, F1),
расширить( П, д( В, F1/G, НДД), Предел, Дер1,
ЕстьРеш, Реш).
преемспис( _, [], []).
преемспис( G0, [В/С | ВВ], ДД) :-
G is G0 + С,
h( В, H), % Эвристика h(B)
F is G + H,
преемспис( G0, ВВ, ДД1),
встав( л( В, F/G), ДД1, ДД).
% Вставление дерева Д в список деревьев ДД с сохранением
% упорядоченности по f-оценкам
встав( Д, ДД, [Д | ДД] ) :-
f( Д, F), опт_f( ДД, F1),
F =< F1, !.
встав( Д, [Д1 | ДД], [Д1 | ДД1] ) ) :-
встав( Д, ДД, ДД1).
% Получение f-оценки
f( л( _, F/_ ), F). % f-оценка листа
f( д( _, F/_, _ ) F). % f-оценка дерева
опт_f( [Д | _ ], F) :- % Наилучшая f-оценка для
f( Д, F). % списка деревьев
опт_f( [], Fмакс) :- % Нет деревьев:
мaкс_f( Fмакс). % плохая f-оценка
мин( X, Y, X) :-
X =< Y, !.
мин( X, Y, Y).
Рис. 12.3. Программа поиска с предпочтением.
Аргументы процедуры расширитьимеют следующий смысл:
Путь |
Путь между стартовой вершиной и корнем дерева Дер. |
Дер |
Текущее (под)дерево поиска. |
Предел |
Предельное значение f -оценки, при котором допускается расширение. |
Дер1 |
Дерево Дер, расширенное в пределах ограничения Предел; f -оценка дерева Дер1больше, чем Предел(если только при расширении не была обнаружена целевая вершина). |
ЕстьРеш |
Индикатор, принимающий значения "да", "нет" и "никогда". |
Решение |
Решающий путь, ведущий из стартовой вершины через дерево Дер1к целевой вершине и имеющий стоимость, не превосходящую ограничение Предел(если такая целевая вершина была обнаружена). |
Переменные Путь, Дер, и Предел — это "входные" параметры процедуры расширитьв том смысле, что при каждом обращении к расширитьони всегда конкретизированы. Процедура расширитьпорождает результаты трех видов. Какой вид результата получен, можно определить по значению индикатора ЕстьРешследующим образом:
Интервал:
Закладка:
