Роберт Лав - Разработка ядра Linux

- Название:Разработка ядра Linux
- Автор:
- Жанр:
- Издательство:Издательский дом Вильямс
- Год:2006
- Город:Москва
- ISBN:5-8459-1085-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Роберт Лав - Разработка ядра Linux краткое содержание
В книге детально рассмотрены основные подсистемы и функции ядер Linux серии 2.6, включая особенности построения, реализации и соответствующие программны интерфейсы. Рассмотренные вопросы включают: планирование выполнения процессов, управление временем и таймеры ядра, интерфейс системных вызовов, особенности адресации и управления памятью, страничный кэш, подсистему VFS, механизмы синхронизации, проблемы переносимости и особенности отладки. Автор книги является разработчиком основных подсистем ядра Linux. Ядро рассматривается как с теоретической, так и с прикладной точек зрения, что может привлечь читателей различными интересами и потребностями.
Книга может быть рекомендована как начинающим, так и опытным разработчикам программного обеспечения, а также в качестве дополнительных учебных материалов.
Разработка ядра Linux - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Структура task_struct— достаточно большая структура данных размером порядка 1,7 Кбайт на 32-разрядной машине. Однако этот размер не такой уж большой, учитывая, что в данной структуре содержится вся информация о процессе, которая необходима ядру. Дескриптор процесса содержит данные, которые описывают выполняющуюся программу, — открытые файлы, адресное пространство процесса, ожидающие на обработку сигналы, состояние процесса и многое другое (рис. 3.1).
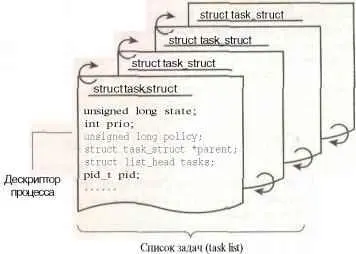
Рис. 3.1. Дескриптор процесса и список задач
Выделение дескриптора процесса
Память для структуры task_structвыделяется с помощью подсистемы выделения памяти, которая называется слябовый распределитель ( slab allocator ), для возможности повторного использования объектов и раскрашивания кэша (cache coloring) (см. главу 11, "Управление памятью"). В ядрах до серии 2.6 структура task_structхранилась в конце стека ядра каждого процесса. Это позволяет для аппаратных платформ, у которых достаточно мало регистров процессора (как, например, платформа x86), вычислять местоположение дескриптора процесса, только зная значение регистра указателя стека ( stack pointer ), без использования дополнительных регистров для хранения самого адреса этого местоположения. Так как теперь дескриптор процесса создается с помощью слябового распределителя, была введена новая структура thread_info, которая хранится в области дна стека (для платформ, у которых стек растет в сторону уменьшения значения адреса памяти) или в области вершины стека (для платформ, у которых стек растет в сторону увеличения значения адреса памяти) [11] Причиной создания структуры thread_info было не только наличие аппаратных платформ, обедненных регистрами процессора, но и то, что положение этой структуры позволяет достаточно просто рассчитывать смешения адресов для значений ее полей при использовании языка ассемблера.
(рис. 3.2.).

Рис 3.2. Дескриптор процесса и стек ядра
Структура struct thread_infoдля платформы x86 определена в файле в следующем виде.
struct thread_info {
struct task_struct *task;
struct exec_domain *exec_domain;
unsigned long flags;
unsigned long status;
__u32 cpu;
__s32 preempt_count;
mm_segment_t addr_limit;
struct restart_block restart_block;
unsigned long previous_esp;
__u8 supervisor_stack[0];
};
Для каждой задачи ее структура thread_infoхранится в конце стека ядра этой задачи. Элемент структуры thread_infoс именем taskявляется указателем на структуру task_structэтой задачи.
Хранение дескриптора процесса
Система идентифицирует процессы с помощью уникального значения, которое называется идентификатором процесса ( process identification , PID ). Идентификатор PID — это целое число, представленное с помощью скрытого типа pid_t [12] Скрытый тип (opaque type) — это тип данных, физическое представление которого неизвестно или не существенно.
, который обычно соответствует знаковому целому— int.
Однако, для обратной совместимости со старыми версиями ОС Unix и Linux максимальное значение этого параметра по умолчанию составляет всего лишь 32768 (что соответствует типу данных short int). Ядро хранит значение данного параметра в поле pidдескриптора процесса.
Это максимальное значение является важным, потому что оно определяет максимальное количество процессов, которые одновременно могут существовать в системе. Хотя значения 32768 и достаточно для офисного компьютера, для больших серверов может потребоваться значительно больше процессов. Чем меньше это значение, тем скорее нумерация процессов будет начинаться сначала, что приводит к нарушению полезного свойства: больший номер процесса соответствует процессу, который запустился позже. Если есть желание нарушить в системе обратную совместимость со старыми приложениями, то администратор может увеличить это максимальное значение во время работы системы с помощью записи его в файл /proc/sys/kernel/pid_max.
Обычно в ядре на задачи ссылаются непосредственно с помощью указателя на их структуры task_struct. И действительно, большая часть кода ядра, работающего с процессами, работает прямо со структурами task_struct. Следовательно, очень полезной возможностью было бы быстро находить дескриптор процесса, который выполняется в данный момент, что и делается с помощью макроса current. Этот макрос должен быть отдельно реализован для всех поддерживаемых аппаратных платформ. Для одних платформ указатель на структуру task_structпроцесса, выполняющегося в данный момент, хранится в регистре процессора, что обеспечивает более эффективный доступ. Для других платформ, у которых доступно меньше регистров процессора, чтобы зря не тратить регистры, используется тот факт, что структура thread_infoхранится в стеке ядра. При этом вычисляется положение структуры thread_info, а вслед за этим и адрес структуры task_structпроцесса.
Для платформы x86 значение параметра currentвычисляется путем маскирования 13 младших бит указателя стека для получения адреса структуры thread_info. Это может быть сделано с помощью функции current_thread_info(). Соответствующий код на языке ассемблера показан ниже.
movl $-8192, %eax
andl %esp, %eax
Окончательно значение параметра currentполучается путем разыменования значения поля taskполученной структуры thread_info:
current_thread_info()->task;
Для контраста можно сравнить такой подход с используемым на платформе PowerPC (современный процессор на основе RISC-архитектуры фирмы IBM), для которого значение переменной currentхранится в регистре процессора r2. На платформе PPC такой подход можно использовать, так как, в отличие от платформы x86, здесь регистры процессора доступны в изобилии. Так как доступ к дескриптору процесса — это очень частая и важная операция, разработчики ядра для платформы PPC сочли правильным пожертвовать одним регистром для этой цели.
Состояние процесса
Поле stateдескриптора процесса описывает текущее состояние процесса (рис. 3.3). Каждый процесс в системе гарантированно находится в одном из пяти различных состояний.
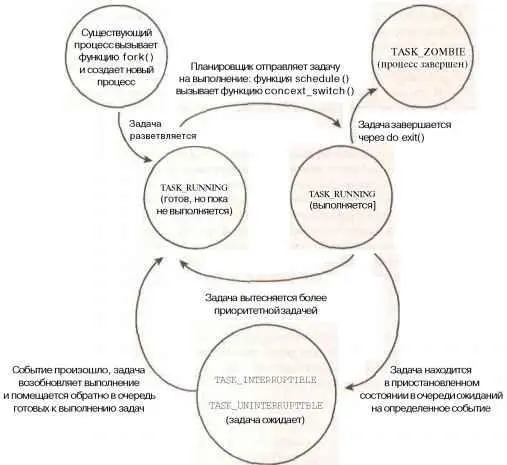
Рис. 3.3. Диаграмма состояний процесса
Эти состояния представляются значением одного из пяти возможных флагов, описанных ниже.
Читать дальшеИнтервал:
Закладка: