Валерий Евстратов - Эхолоты и GPS навигаторы

- Название:Эхолоты и GPS навигаторы
- Автор:
- Жанр:
- Издательство:Рыбацкая Академия5619bb37-164c-102b-9d2a-1f07c3bd69d8
- Год:2006
- Город:Москва
- ISBN:5-94382-079-5
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Валерий Евстратов - Эхолоты и GPS навигаторы краткое содержание
Эта книга предназначена широкому кругу рыбаков, желающих познакомиться с современными радиоэлектронными приборами, оказывающими существенную помощь в ловле рыбы. В книге изложены принципы действия и основы использования наиболее популярных и доступных приборов – рыбопоисковых эхолотов и приемников спутниковой навигации, позволяющих обнаруживать рыбу и запоминать нужные места. В то же время, учитывая происходящие в последнее десятилетие качественные изменения в техническом оснащении рыбаков, прежде всего судами, читателю предлагается познакомиться и с рядом других приборов, не имеющих прямого отношения к рыбалке.
Эхолоты и GPS навигаторы - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:

Рис . 70.Состав судового радиолокатора
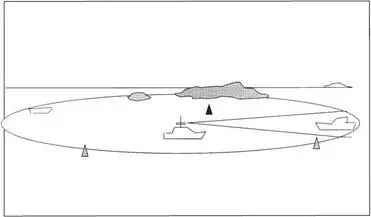
Рис . 71.Принцип действия судового радиолокатора
Основные характеристики радаров
Функциональные возможности радиолокатора определяются рядом характеристик, понимание которых позволяет сделать правильный выбор аппарата, в той или иной степени удовлетворяющего потребностям владельца судна. Познакомимся с некоторыми из них.
Дальность действия
Дальность действия радара, указываемая в его паспортных данных – это его важнейший, но далеко не однозначный показатель, и в реальных условиях дальность обнаружения различных целей не всегда будет совпадать с заявленной.
Дальность обнаружения зависит от многих факторов – отражательной способности цели (характеризуемой т.н. ЭПР – эффективной поверхностью рассеяния), ее контрастностью по отношению к фону, высотой антенны и цели, состоянием атмосферы и моря. Поэтому, данная характеристика задается дифференцированно по типам целей и условиям работы радара. В соответствии с требованиями Международной Морской Организации IMO, при нормальных условиях распространения радиоволн, высоте установки антенны РЛС 15 м над уровнем воды и при отсутствии помех от моря, РЛС должна обеспечивать четкую индикацию:
Береговой черты:
– при высоте берега до 60 м на расстоянии до 20 морских миль;
–при высоте берега до 6 м на расстоянии до 7 морских миль.
Надводных объектов:
– судов валовой вместимостью 5000 т на расстоянии 7 морских миль независимо от ракурса;
– небольшого судна длиной 10 м на расстоянии 3 морских мили;
– объектов, аналогичных навигационному бую, имеющих ЭПР приблизительно 10 кв.м, на расстоянии 2 морских мили.
Поскольку обнаружение целей возможно только при наличии прямой видимости, то, зная высоту установки антенны радара и ориентировочно высоту цели, можно определить предельную дальность обнаружения в километрах, пользуясь известным выражением:
где h1 и h2 – высота установки антенны и высота цели над уровнем моря в метрах.
Обычно в паспортных данных приводят максимальную (инструментальную) дальность, составляющую для большинства компактных яхтенных радаров 16–36 морских миль.
В реальных условиях радиолокационное наблюдение ведется, как правило, на меньших расстояниях, определяемых потребностями судовождения. В этих случаях использование развертки экрана с максимальной дальностью нецелесообразно, т.к., это приводит к существенной перегруженности экрана и к уменьшению размеров цели, что затрудняет ее обнаружение. Поэтому, в радарах существует несколько так называемых шкал дальности – значений, в пределах которых может работать радар. Ниже приведен набор шкал дальности одного портативного радиолокатора:
Дальность (миль)
0,125 0,25 0,5 0,75 1,5 3,0 6,0 12 16
Такое большое количество шкал позволяет получать общее представление об окружающем пространстве на больших расстояниях и получать детальное радиолокационное изображение на дальностях, наиболее важных для обеспечения безопасности плавания. Кроме того, в некоторых радарах имеется возможность выделения и просмотра в укрупненном масштабе отдельных участков окружающего пространства.
Ошибки определения координат цели
Для любого навигационного прибора, определяющего местоположение, важнейшим показателем является ошибка определения местоположения. Судовой радар определяет две координаты цели – дальность относительно антенны и направление (азимут) относительно линии направления (истинного, магнитного, направления движения). Ошибка определения расстояния портативных радаров обычно составляет (0,9–1)% от максимального значения используемой шкалы дальности, ошибка определения направления – ±1°.
Скорость вращения антенны
Этот параметр определяет скорость обновления информации на экране радара и особенно важен при управлении скоростными судами. Скорости вращения антенн портативных радаров достаточно высокие – в зависимости от модели от 24 до 36 об/мин, что позволяет использовать их на всех доступных скоростях передвижения по воде.
Функциональные возможности Функциональные возможности радаров определяют удобство работы с прибором и способность получения той или иной информации. Для понимания того, что может современный радар, вспомним его основные функции.
Обнаружение целей
Обнаружение любых объектов осуществляется визуально на экране локатора. Небольшие объекты – суда, буи, островки – отображаются в виде ярких точек на фоне различных помех – от собственных шумов приемника, отражений от волн и атмосферных осадков, маскирующих отметки от целей. Поэтому, обнаружение целей является процессом выделения их отметок из помех.
Для выделения отметок от целей на фоне помех в судовых радарах предусмотрены различные функции – регулировка усиления приемника, подавление отражений от волн и дождя, расширение отметки (введение т.н. «следа эхо») и ряд других ухищрений, определяющих возможности радара быстро и надежно обнаруживать цели.
Определение координат целей Как уже отмечалось выше, судовой радиолокатор определяет две координаты в своей местной системе – дальность относительно судна и азимут относительно диаметральной плоскости судна или направления на север.
Измерение дальности
Дальность до цели может осуществляться тремя способами – с помощью колец дальности, с помощью курсора и с помощью маркера переменного расстояния VRM.
Если посмотреть на экран радара, первое, что бросается в глаза – это находящиеся на нем концентрические кольца ( рис . 72). Количество колец и расстояния между ними жестко связаны с используемыми шкалами дальности. Если, например, используется шкала дальности 16 миль, а на экране 8 колец, то понятно, что интервал между кольцами составляет 2 мили. Для измерения расстояния до цели достаточно подсчитать количество колец между ее отметкой и центром экрана, умножить это число на расстояние между кольцами и прибавить оцененное на глаз приблизительное расстояние отметки от внутренней кромки ближайшего по направлению к центру кольца. Понятно, что такой способ дает наглядную и быструю, но весьма грубую оценку, поэтому для получения точных значений используют два других способа.
Читать дальшеИнтервал:
Закладка: