Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века

- Название:Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
- Автор:
- Жанр:
- Издательство:Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет
- Год:2013
- Город:Санкт-Петербург
- ISBN:978-5-94652-418-9
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века краткое содержание
Освещаются актуальные в настоящее время вопросы обеспечения национальной безопасности на фоне стремительного развития боевых морских роботов, которое в ближайшем будущем может изменить баланс мировых сил. Автор рассматривает существующие и перспективные образцы необитаемых морских систем разного назначения, приводит анализ возможных асимметричных действий против новой угрозы, а также обозначает ряд возможных технических решений для систем борьбы с необитаемыми морскими аппаратами.
Для специалистов, работающих в области подводных специализированных комплексов и аппаратов, руководителей разных уровней ВМФ России, студентов и аспирантов профильных технических вузов, а также курсантов и адъюнктов военных училищ и академий.
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Истребительные СБНАосуществляют физическое уничтожение боевых аппаратов. Они обеспечивают как полное, так и частичное уничтожение НПА противника, в том числе повреждение его сенсорных систем (например, взрывом), повреждение жизненно важных элементов: корпуса, систем управления, в том числе линий телесвязи, двигательно-движительного комплекса и т. п. При этом конечным результатом их работы является срыв миссии необитаемого аппарата, нанесение ему повреждений, не позволяющих продолжать выполнение боевой задачи.
Захватывающие СБНАдолжны осуществлять захват (пленение) аппаратов противника. К подобным системам могут относиться сети, специализированные ловушки (капканы для НПА), и т. п. По большей части, подобные СБНА применимы к подводным аппаратам, однако, не исключена возможность разработки систем пленения и для надводных аппаратов. Воздействие таких систем на необитаемые аппараты должно сводиться к обездвиживанию аппарата, «заглушению» его каналов связи, по которым он может передать сигнал о пленении оператору и получить обратно, например, сигнал о самоуничтожении (для аппаратов, не имеющих каналов подводной связи, достаточно не позволить им всплыть на поверхность), и сигнализации о срабатывании ловушки.
Комплексные СБНАмогут выполнять функции нескольких типов систем. Их состав может определяться любым конкретным назначением системы. В качестве примера подобной системы, объединяющей все три типа СБНА, можно привести устройство, заякоренное на большой глубине. Поднимаясь к поверхности, его активная часть «приманивает» к себе НПА противника, создавая «ложную цель» (при этом дополнительно работает система «свой-чужой», позволяющая исключить захват своего НПА), захватывает аппарат, обездвиживая его, и за счет лебедки, расположенной в якорной части, «утягивает» на недопустимую для аппарата глубину погружения, автоматически выводя его из строя.
Еще одна возможная классификация СБНА может определять типы систем исходя из типа объектов, для защиты которых они создаются, например:
1. СБНА для защиты подводных лодок;
2. СБНА для защиты минных полей;
3. СБНА для защиты акваторий, портов, подводных полигонов, районов базирования ракетоносцев, охраны границ и т. п.;
4. СБНА для защиты стационарных морских сооружений (нефтяных буровых платформ и т. п.);
5. СБНА для защиты надводных кораблей и т. д.
Кроме того, все системы борьбы с необитаемыми аппаратами (не только морскими), естественно, могут распределяться по типам исходя из типа целей, для работы против которых они разрабатываются (рис. 34).
Как уже неоднократно отмечалось, в настоящей монографии рассматриваются вопросы, связанные с разработкой систем борьбы с необитаемыми морскими аппаратами (не только морскими), естественно, могут распределяться по типам исходя из типа целей, для работы против которых они разрабатываются (рис. 34).
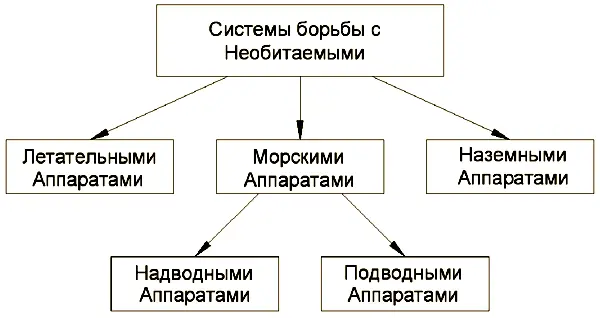
Рис. 34. Классификация СБНА исходя из их целей.
Как уже неоднократно отмечалось, в настоящей монографии рассматриваются вопросы, связанные с разработкой систем борьбы с необитаемыми морскими аппаратами.
Рассмотрим перечисленные типы СБНА немного подробнее и обозначим ряд вопросов, которые необходимо решать при их создании.
3.1. Обманные системы борьбы с необитаемыми аппаратами
Данный тип систем борьбы с необитаемыми аппаратами наиболее распространен в настоящее время в виде средств гидроакустического противодействия (ГПД), дрейфующих НПА самообороны и других подобных устройств. Как правило, данные приборы рассматриваются и разрабатываются как средство противоторпедной защиты (ПТЗ), т. е. средство «увода» атакующей торпеды от подводной лодки или средство создания помех, мешающих работе системы самонаведения торпеды.
Характерным примером подобного средства ГПД является самоходный прибор гидроакустического противодействия МГ-74Э (рис. 35) [28], разработанный ЦНИИ «Гидроприбор» и предназначенный для противодействия гидроакустическим комплексам подводных лодок, надводных кораблей, гидроакустическим средствам наблюдения противолодочных сил и для противодействия системам самонаведения торпед.

Рис. 35. Прибор ГПД МГ-74Э.
Предназначен для использования с подводных лодок. По своим внешним обводам, основным составным частям, энергосиловой установке, системе управления движением, вспомогательным системам и устройствам, элементам стыковки с торпедным аппаратом прибор аналогичен электрической торпеде.
В состав прибора входят:
— электронный модуль;
— силовой модуль;
— приборный модуль;
— модуль двигателя, движителя и рулевого оперения.
Система управления движением по курсу, глубине и крену обеспечивает двухплоскостное маневрирование в режимах, аналогичных маневрированию ПЛ.
В головной части размещается бортовая электронно-акустическая аппаратура, предназначенная для акустической имитации первичного (шум) или вторичного (эхо) акустических полей движущейся ПЛ, а также для создания прицельной по частоте помехи гидролокаторам сил ПЛО противника.
Прибор выстреливается из штатных торпедных аппаратов и может работать в следующих режимах:
— излучение прицельной по частоте помехи;
— имитация эхо-сигналов от ПЛ;
— имитация шума ПЛ.
Также существуют две модификации прибора МГ-74МЭ, схема боевого применения которых приведена на рис. 36 [29].
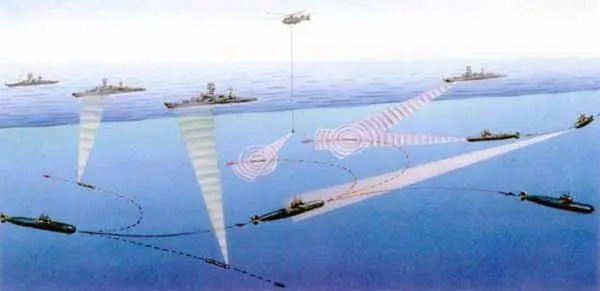
Рис. 36. Схема боевого применения МГ-74МЭ.
На вооружении ВМФ России стоит комплекс пусковых установок забортного расположения «Шлагбаум» [30], предназначенный для размещения и пуска средств ГПД калибра 324 мм (рис. 37).
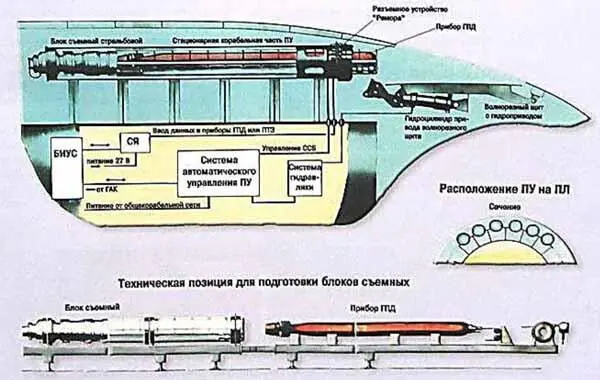
Рис. 37. Комплекс «Шлагбаум» [31].
Общим недостатком представленных систем является ограниченное количество приборов ГПД, располагаемых на подводной лодке. При этом в случае, когда средства ГПД хранятся в торпедном отсеке ПЛ и выпускаются из штатных торпедных аппаратов, они занимают место оружия, которым могла бы быть вооружена подводная лодка, и, соответственно, понижают ее боевую эффективность.
Также необходимо заметить, что при обнаружении и атаке ПЛ крупным подводным противолодочным аппаратом (например, типа Manta), средства ГПД с определенной эффективностью могут способствовать только отведению от лодки непосредственно выпущенного роботом оружия, но не самого робота, который представляет более серьезную угрозу ввиду большего запаса энергии, позволяющего ему преследовать и повторно атаковать свою цель.
Читать дальшеИнтервал:
Закладка:
![Макс Глебов - Асимметричный ответ [СИ litres]](/books/1067943/maks-glebov-asimmetrichnyj-otvet-si-litres.webp)