Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века

- Название:Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века
- Автор:
- Жанр:
- Издательство:Министерство образования и науки Российской Федерации Санкт-Петербургский государственный морской технический университет
- Год:2013
- Город:Санкт-Петербург
- ISBN:978-5-94652-418-9
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Роман Красильников - Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века краткое содержание
Освещаются актуальные в настоящее время вопросы обеспечения национальной безопасности на фоне стремительного развития боевых морских роботов, которое в ближайшем будущем может изменить баланс мировых сил. Автор рассматривает существующие и перспективные образцы необитаемых морских систем разного назначения, приводит анализ возможных асимметричных действий против новой угрозы, а также обозначает ряд возможных технических решений для систем борьбы с необитаемыми морскими аппаратами.
Для специалистов, работающих в области подводных специализированных комплексов и аппаратов, руководителей разных уровней ВМФ России, студентов и аспирантов профильных технических вузов, а также курсантов и адъюнктов военных училищ и академий.
Системы борьбы с необитаемыми аппаратами — асимметричный ответ на угрозы XXI века - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
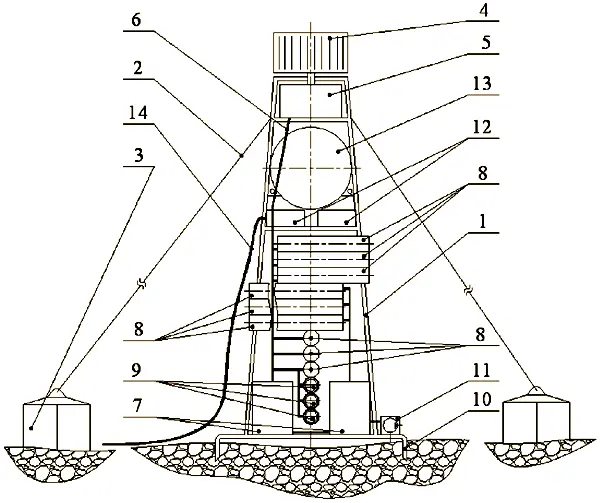
Рис. 41. Общий вид сторожевой башни (пусковой платформы).
На рис. 41 показан общий вид пусковой платформы, на котором прочный корпус 1 платформы установлен вертикально на грунте и зафиксирован в этом положении с помощью растяжек 2, прикрепленных к якорям 3.
В верхней части корпуса 1 расположена использующая течение турбина 4, вал которой взаимодействует с электрогенератором 5, энергия от которого передается по кабелю 6 и накапливается в аккумуляторах 7. Внутри корпуса 1 установлены связанные с аккумуляторами 7 пусковые установки 8, в которых расположены оборонные необитаемые подводные аппараты 9 (торпеды).
Нижняя часть корпуса 1 выполнена в виде круглой юбки 10, врезанной в донную породу. На наружной части юбки установлен гидравлический насос 11, соединенный с внутренним пространством между юбкой 10 и дном.
Также внутри корпуса 1 находится информационно-управляющая аппаратура 12, обрабатывающая информацию, поступающую от гидроакустической антенны 13, а также от охраняемого объекта или наземного контрольного пункта. Эта информация, совместно с возможной подачей платформе резервной электроэнергии, передается по проложенным по дну акватории кабелям 14.
Подводная пусковая платформа работает следующим образом.
Перед установкой на дно подводная платформа полностью подготавливается к эксплуатации в течение определенного промежутка времени. При этом происходит зарядка аккумуляторов 7, производится жесткий монтаж и проверка работоспособности оборудования, располагаемого внутри и снаружи прочного корпуса 1, а также заряжание внутрь пусковых установок 8 подводных аппаратов 9.
После транспортировки платформы к месту ее установки на дно, водолазами или подводными аппаратами производится монтаж на грунте якорей 3. После этого к верхней части корпуса 1, имеющего отрицательную плавучесть, прикрепляется не показанная на чертеже заполненная газом емкость, имеющая такой объем, чтобы общая плавучесть платформы, соединенной с ней, была положительной, но близкой к нулевой. После этого с помощью грузового приспособления платформа опускается с обеспечивающего судна в воду, и остается на плаву близко к поверхности воды. Далее в помощью водолазов к платформе прикрепляются растяжки 2, соединенные с якорями 3.
Изменяя количество газа в емкости и работая лебедками, убирая слабину растяжек 2, осуществляют управляемое погружение платформы, находящейся в вертикальном положении, на дно.
По достижении дна прочный корпус 1 ориентируют с помощью растяжек 2 в вертикальной и горизонтальной плоскостях, после чего приводят в действие питающийся от аккумуляторов 7 гидронасос 11, который выкачивает воду из полости, создаваемой внутренним объемом юбки 10 и наружной поверхностью дна. При этом на наружную поверхность юбки 10 действует гидростатическое давление, которое способствует ее заглублению в грунт и прочной установке платформы. Установка завершается окончательным выравниванием корпуса 1 в вертикальной плоскости за счет натяжения растяжек 2.
Установленные вокруг охраняемого объекта одна или несколько пусковых платформ соединяются с ним или с наземным контрольным пунктом кабелями 14. По сигналу от охраняемого объекта, установленная на дно платформа активирует систему оперативного слежения за подводной обстановкой и начинает передавать получаемую информацию на охраняемый объект. При этом также начинает действовать система электропитания платформы — под действием подводных течений приводится в движение турбина 4, вращение которой с помощью электрогенератора 5, преобразуется в электроэнергию. Меньшая часть этой энергии потребляется на работу информационно-управляющей аппаратуры 12 и гидроакустической антенны 13, а большая — на зарядку аккумуляторов 7. При этом общее время непрерывной зарядки аккумуляторов (до нескольких месяцев) позволяет компенсировать низкую скорость вращения турбины 4 из-за небольшой скорости подводных течений.
В случае возникновения угрозы для охраняемого объекта со стороны каких-либо подводных объектов (необитаемых аппаратов, в том числе надводных), система оперативного слежения обнаруживает их и классифицирует. При этом, определяемое при установке расстояние от пусковой платформы до охраняемого объекта дает дополнительное время на более точное определение координат опасного объекта и выяснение траектории его движения. Это, в свою очередь, способствует более эффективной работе охранных необитаемых подводных аппаратов 9.
В случае, если объект действительно представляет опасность для охраняемого объекта, принимается решение на выпуск одного или нескольких подводных аппаратов 9 для его уничтожения или отведения от цели. При этом, количество пусковых установок 8 позволяет хранить на пусковой платформе необитаемые аппараты 9 разного типа действия — от волнового (низкочастотного) воздействия на биологический объект до воздействия ударной волны (гидравлического удара) на техническое устройство.
Для создания выталкивающего необитаемый аппарат 9 импульса, пусковая установка 8 использует электроэнергию аккумулятора (или нескольких аккумуляторов) 7. При этом общая энергия аккумуляторов 7 должна обеспечивать не менее, чем три последовательных срабатывания пусковых установок 8.
В случае, если угроз много, и возникает необходимость в пуске большего количества подводных аппаратов 9, электроэнергия для работы пусковых установок 8 может быть получена непосредственно от охраняемого объекта по кабелю 14.
Следует заметить, что условия целенаправленной борьбы с НПА существенно отличаются от требований, предъявляемых к средствам ПТЗ. Так, частоты гидроакустических средств НПА в десятки раз выше частот, используемых в системах самонаведения торпед. Также качественно различаются и скорости движения подводных аппаратов и торпедного оружия. Кроме этого существует разница в габаритах, заметности и материалах корпусных конструкций НПА и торпед, что также требует адаптации характеристик противоторпед к новому типу целей.
Можно также добавить, что вопрос размещения на уничтожающих СБНА (НПА-охотниках) морского оружия (самотранспортирующихся мин, торпед и противоторпед), требует создания специальных пусковых установок. Ниже этот вопрос будет рассмотрен более подробно.
3.3. Захватывающие системы борьбы с необитаемыми аппаратами
Захватывающие СБНА являются очень перспективными, так как они позволяют получать информацию о разработках противника, а также использовать захваченные аппараты в своих целях. В настоящее время (по сведениям, доступным в печати) подобные системы еще находятся только в начальной стадии активной разработки.
Читать дальшеИнтервал:
Закладка:
![Макс Глебов - Асимметричный ответ [СИ litres]](/books/1067943/maks-glebov-asimmetrichnyj-otvet-si-litres.webp)