Игнаси Белда - Том 33. Разум, машины и математика. Искусственный интеллект и его задачи

- Название:Том 33. Разум, машины и математика. Искусственный интеллект и его задачи
- Автор:
- Жанр:
- Издательство:Де Агостини
- Год:2014
- ISBN:978-5-9774-0728-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Игнаси Белда - Том 33. Разум, машины и математика. Искусственный интеллект и его задачи краткое содержание
Уже несколько десятилетий тема искусственного интеллекта занимает умы математиков и людей, далеких от науки. Ждать ли нам в ближайшем будущем появления говорящих машин и автономных разумных систем, или робот еще не скоро сравнится с человеком? Что такое искусственный интеллект и возможно ли в лабораторных условиях создать живой разумный организм? Ответы на эти и многие другие вопросы читатель узнает из данной книги. Добро пожаловать в удивительный мир искусственного интеллекта, где математика, вычисления и философия идут рука об руку.
Том 33. Разум, машины и математика. Искусственный интеллект и его задачи - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Основы этой дисциплины заложили математики Джон фон Нейман и Оскар Моргенштерн во время холодной войны. Их целью был поиск оптимальных военных стратегий, однако теория игр быстро нашла применение в экономике, политике, этике, философии, биологии и, разумеется, вычислительной технике.
Теория игр крайне полезна при изучении сложных адаптивных систем, так как агенты, составляющие эти системы, часто должны соперничать или сотрудничать между собой для общего блага. При сотрудничестве часто происходит так, что отдельные усилия конкретного агента оказываются выше, чем общая выгода, пропорционально разделенная между всеми агентами, составляющими систему. Тем не менее эти отдельные усилия способны сыграть определяющую роль при достижении общего результата, который может на несколько порядков превышать индивидуальные усилия агентов. Таким образом, чтобы стимулировать адекватное поведение агентов, составляющих систему, и определить ее жизнеспособность на основе их поведения, необходимо использовать методы теории игр.
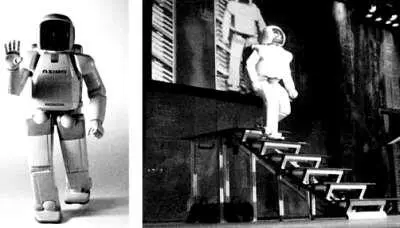

Знаменитый робот ASIMO, созданный в компании Honda, способен, подобно человеку, спускаться по лестнице и играть в футбол.
И вновь интеллектуальный анализ данных
Искусственная жизнь привлекательна и окутана тайной для непосвященных. Однако описанные нами понятия, которые скрываются за определением искусственной жизни, например клеточные автоматы, используются для решения достаточно прозаических инженерных задач, в частности для интеллектуального анализа данных, о котором мы уже рассказали. В задачах анализа данных для получения выводов требуется обрабатывать огромные объемы данных, что не под силу экспертам-людям. По этой причине для анализа обычно используются интеллектуальные информационные инструменты.
Анализ данных можно выполнить множеством средств, среди которых особое место занимают клеточные автоматы, так как они позволяют представить взаимосвязи между данными в пространстве. Допустим, что мы анализируем данные о продажах зонтов в конкретной стране. Сведения о продажах с разбивкой по клиентам могут быть обработаны без учета местоположения, в лучшем случае — разделены на категории по территориям: к примеру, клиент Аиз города Xприобрел 20 единиц товара, клиент Виз города У— 240 единиц, клиент Сиз города Z— 4530 единиц. В системе, где не учитывается территориальное распределение, города X, Yи Z— всего лишь категории, и мы никак не можем указать, что город Xнаходится в 150 км к югу от Y, а Y— в 400 км южнее Z. Если мы будем учитывать эти данные, то станет понятно, что в северном регионе страны дожди идут чаще, а к югу продажи зонтов существенно снижаются.
Теперь представим данные о местоположении в виде таблицы, подобно тому, как это происходит при использовании клеточных автоматов. Постараемся связать расположение данных в таблице с реальным географическим местоположением регионов, откуда поступили данные о продажах. При таком представлении данных территориальное расположение можно учесть намного более интеллектуальным способом, чем при простом разбиении на категории.
После сведения данных в таблицу можно применить эволюционный алгоритм, позволяющий обнаружить правила, которые необходимо реализовать в клеточном автомате для анализа. Вернемся к примеру с продажами зонтов и дополним данные о продажах уровнем осадков в егионах. Мы можем разработать алгоритм, позволяющий получить множество правил, согласно которым раскрасим клетки таблицы в тот или иной цвет в зависимости от продаж зонтов в различных регионах, исключив влияние уровня осадков. Если мы представим данные о продажах на карте без учета уровня осадков, получим следующую картину.
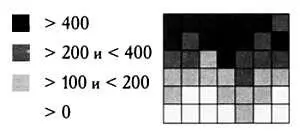
Если мы исключим воздействие разного уровня осадков, карта будет выглядеть следующим образом.
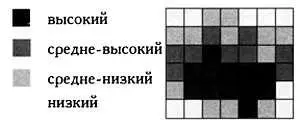
На основе этих данных эксперт может определить, что объем продаж выше всего в центральных и южных регионах. Это означает, что уровень покупательной способности в этой части страны выше: из-за особенностей погоды зонты не являются товаром первой необходимости, однако люди готовы покупать их. Далее компания — продавец зонтов повысит цены в центре и на юге страны: хотя в этом регионе продажи меньше, люди покупают зонт не из необходимости, а как предмет роскоши, следовательно, менее чувствительны к цене.
Еще одна очень важная область, в которой используется искусственная жизнь и сложные адаптивные системы в целом, это программирование роботов. Постепенно широкому потребителю становятся доступными домашние роботы, способные пылесосить, протирать пол и даже определять вторжение посторонних в квартиру.
Такие роботы обычно мобильны, однако их перемещениями и действиями должна руководить интеллектуальная система. Рассмотрим роботов-пылесосов и покажем, как они соответствуют определению сложных адаптивных систем.

Робот-пылесос — один из самых известных домашних роботов.
— Агрегирование . Разумеется, эти роботы представляют собой агрегированные системы, так как содержат мотор, датчики присутствия, пылесос, устройство обработки данных, определяющее, в каком направлении должен двигаться робот, и так далее.
— Нанесение меток. Эти роботы могут присваивать метки различным элементам среды и взаимодействовать с ними. К примеру, если робот определяет, что некоторая область грязнее обычного, он помечает ее соответствующей меткой и прилагает больше усилий для ее уборки. Пользователь также может отметить зону, в которую робот не должен заходить, и он будет избегать этой зоны.
— Нелинейность . Поведение робота очевидно нелинейно, так как его части в совокупности способны решать намного более важные задачи, чем по отдельности. Мотор, колеса, пылесос и другие элементы робота независимо друг от друга не смогут провести уборку в доме без вмешательства человека, а когда все эти элементы объединены в сложную адаптивную систему, они способны убрать пыль самостоятельно.
Читать дальшеИнтервал:
Закладка: