В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями

- Название:500 схем для радиолюбителей. Дистанционное управление моделями
- Автор:
- Жанр:
- Издательство:Наука и техника
- Год:2007
- Город:Санкт-Петербург
- ISBN:978-5-94387-358-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями краткое содержание
В данной книге представлены схемные решения СХЕМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МОДЕЛЯМИ. Приводимого краткого описания вполне достаточно для самостоятельного изготовления понравившейся конструкции.
Изготовление моделей само по себе очень увлекательное занятие. Но наибольший интерес представляет изготовление именно управляемых моделей. Они давно получили широкое распространение в Японии, США и Европе. А в России моделирование делает первые шаги: создаются клубы любителей, появляются магазины, торгующие готовыми комплектами (модель и система управления)… Однако фирменные изделия недешевы, да и трудно отказать в себе удовольствии самостоятельно изготовить некоторые элементы и даже комплект целиком!
Данная книга уникальна. Она познакомит читателя с принципами функционирования и практической схемотехникой. Все рассмотренные конструкции выполнены на современной элементной базе, схемы сопровождаются подробными описаниями, рисунками печатных плат, рекомендациями по сборке и настройке.
Книга рассчитана как для начинающих, так и на «продвинутых» радиолюбителей, увлекающихся практической радиоэлектроникой.
500 схем для радиолюбителей. Дистанционное управление моделями - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Времязадающие конденсаторы С1, С6, С7 должны быть пленочного типа (например К73-17), остальные— керамические. Микросхему таймера КР1006ВИ1 можно заменить импортными аналогами LM555, NE555. Счетверенный компаратор КР1401СА1— на импортную микросхему LM339N. Выходные транзисторы можно менять на любые мощные, соответствующих проводимостей, но потери мощности на них в этом случае увеличатся, что крайне нежелательно при батарейном питании модели. Диоды — любые маломощные кремниевые. Подстроечные потенциометры — типа СПЗ-38 или РП-1.
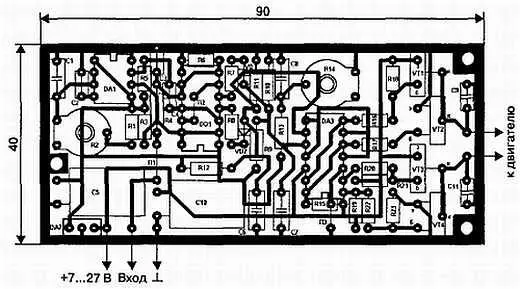
Рис. 7.10. Печатная плата регулятора хода
Настройка
Настройка регулятора хода сводится к установке опорной длительности импульсов ждущего мультивибратора и установке порога срабатывания компараторов, обеспечивающего коэффициент удлинения равный 40.
Временно отключают двигатель. На вход устройства подают канальные импульсы от формирователя команд собственного передатчика или прямоугольные импульсы с выхода генератора сигналов. Импульсы должны быть положительной полярности и иметь амплитуду 4–5 В. Их длительность устанавливается равной 2 мс, а период следования — 20 мс.
Контролируя на выводе 3 микросхемы DA1 наличие положительного импульса, установить его длительность равной 1,5 мс с помощью потенциометра R2. Длительность отрицательного разностного импульса на выходе временного дискриминатора (выводе 10 DD1.3) должна быть равна 0,5 мс.
Переключить осциллограф на выход компаратора (вывод 2 DA3) и потенциометром R14 установить длительность отрицательного импульса равной 19–19,5 мс.
Подключить двигатель и убедится, что его скорость вращения плавно меняется при изменении длительности входного импульса в пределах 1–2 мс от максимальной до нуля, а после смены направления движения — опять до максимальной.
Для лучшего подавления помех от искрящего коллектора полезно соединить выводы двигателя с его корпусом через конденсаторы емкостью 0,1 мкФ, расположив их непосредственно на двигателе. В цепи питания двигателя желательно также включить дроссели на 20–50 мкГн.
При отсутствии таймера КР1006ВИ1 ждущий мультивибратор можно собрать по схеме, приведенной на рис. 7.11. Печатную плату при этом придется, естественно, переделать. Микросхема DD2 соответствует микросхеме DD1 на рис. 7.9. Требуемая длительность опорного импульса устанавливается потенциометром R2. Диод VD1 может быть типа КД521, КД522.
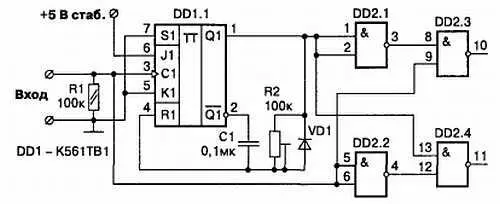
Рис. 7.11. Вариант ждущего мультивибратора
7.2.3. Третий вариант регулятора хода
Принципиальная схема
Компактная схема регулятора хода приведена на рис. 7.12. Здесь ждущий мультивибратор и временной дискриминатор выполнены всего на одной микросхеме DD1. Удлинители импульсов реализованы на компараторах DA1.1 и DA1.2. Элементы DA1.3 и DA1.4 выполняют функции инверторов. Использование полевых транзисторов в мостовой схеме управления двигателем существенно повышает КПД выходного каскада.
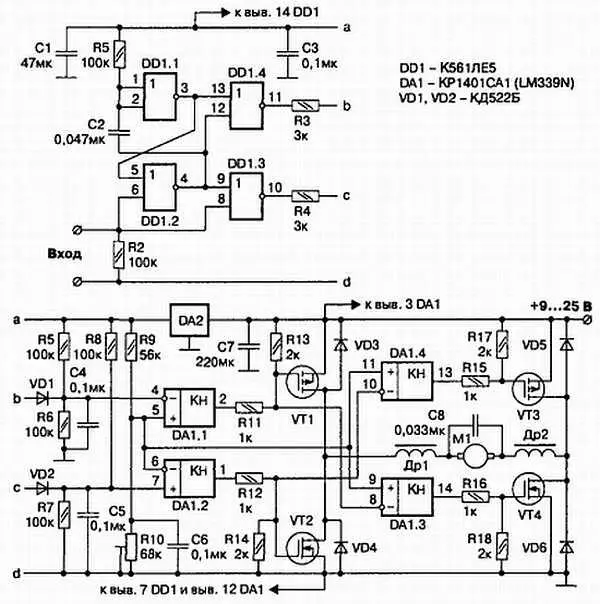
Рис. 7.12. Регулятор хода. Вариант № 3
В качестве транзисторов VT1—VT4 можно подобрать большое количество комплементарных пар, ориентируясь на имеющееся напряжение питания и мощность исполнительного двигателя. Печатная плата (рис. 7.13) разведена под использование в выходном каскаде двух транзисторных сборок типа IRF7105, упоминавшихся выше. Они в своем составе содержат и демпфирующие диоды VD3—VD6. В этом случае напряжение питания может лежать в пределах 7—25 В при токе нагрузки не более 2 А.
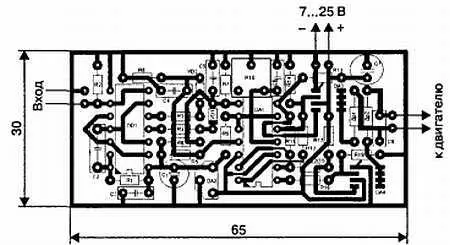
Рис. 7.13. Печатная плата
Транзисторные сборки обозначены на плате как DA3 и DA4 и монтируются со стороны печатных проводников, так как они выполнены в корпусах, предусматривающих поверхностный монтаж. Конденсаторы С2, С4 и С5 должны быть пленочными (К73-17). Подстроечный резистор R10 — типа СПЗ-19 или аналогичный по размерам импортный прямоугольной формы. Стабилизатор DA2 — малогабаритный 1170ЕН5 или его импортный аналог.
Настройка
В процессе настройки после проверки правильности монтажа подают питание на плату и убеждаются в наличии +5 В на выходе стабилизатора напряжения DA2. Двигатель при этом должен быть отключен. Затем на вход регулятора следует подать прямоугольные импульсы амплитудой 4–5 В, длительностью 2 мс и с периодом повторения 20 мс. Подключив осциллограф к выводу 3 DD1, установить длительность наблюдаемого положительного импульса равной 1,5 мс. Установка производится подбором величины резистора R1, для чего на его место можно временно подключить последовательно соединенные резистор номиналом 33 кОм и потенциометр— 100 кОм. Далее на выводе 11 контролируется наличие разностного положительного импульса длительностью 0,5 мс.
Переключив осциллограф на вывод 2 DA1, настраивают порог срабатывания компаратора удлинителя импульсов. Движок потенциометра R10 устанавливается в верхнее (по схеме) положение и затем медленно вращается до появления на экране осциллографа отрицательных импульсов.
Настройку можно считать законченной, когда длительность отрицательных импульсов станет примерно равной 19 мс, т. е. они практически сольются. Присоединив двигатель, необходимо убедиться, что направление его вращения соответствует направлению отклонения ручки управления. В противном случае выводы двигателя необходимо поменять местами.
При отсутствии полевых транзисторов, силовую часть и удлинители импульсов можно выполнить на биполярных транзисторах, по схеме, приведенной на рис. 7.6. Стыковка производится по выводам 10 и 11 микросхемы DD1. Плата при этом разводится заново.
7.2.4. Четвертый вариант регулятора хода
Принципиальная схема
В разделе 7.1 уже упоминались специализированные микросхемы (драйверы) для управления двигателями постоянного тока. Их с успехом можно применять и в регуляторах хода. На рис. 7.14 приведен вариант такой схемы. Ждущий мультивибратор и временной дискриминатор здесь ничем не отличаются от использованных в варианте 2 (рис. 7.9). Удлинитель импульсов реализован на сдвоенном операционном усилителе DA2.
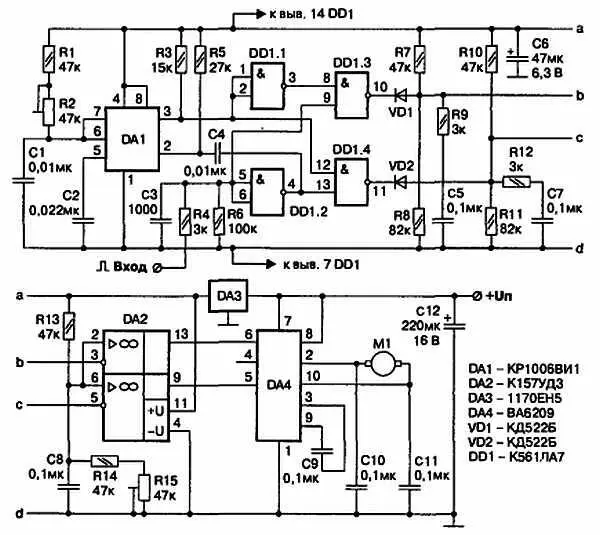
Рис. 7.14. Регулятор хода. Вариант № 4
Читать дальшеИнтервал:
Закладка: