Георгий Тиняков - Пилотирование вертолета

- Название:Пилотирование вертолета
- Автор:
- Жанр:
- Издательство:Военное издательство Министерства обороны Союза ССР
- Год:1960
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Георгий Тиняков - Пилотирование вертолета краткое содержание
Книга иллюстрирована рисунками, раскрывающими физический смысл явлений, происходящих при пилотировании вертолета.
Книга рассчитана на массового читателя — советскую молодежь, стремящуюся овладеть полетами на вертолетах. Она может быть полезной также для летного и технического состава ВВС и ДОСААФ.
Пилотирование вертолета - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Происходило это вследствие разности подъемных сил на левой и правой половинах несущего винта с жестко закрепленными лопастями при наличии поступательной скорости.
На рис. 34 изображено поле скоростей несущего винта вертолета при полете с поступательной скоростью.
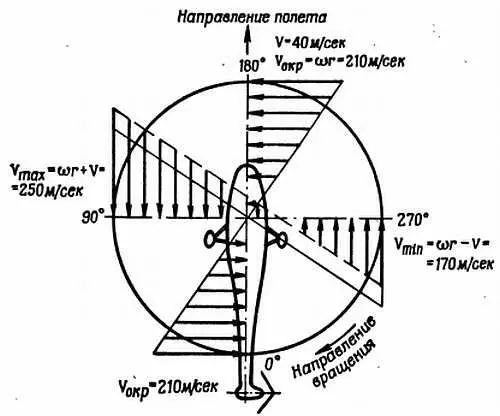
Рис. 34. Поле скоростей несущего винта при полете с поступательной скоростью (вид сверху)
Примем, что окружная скорость концов лопастей несущего винта равна 210 м/сек, а скорость полета вертолета — 40 м/сек, тогда в зависимости от азимутального положения лопасти скорость набегающего на лопасть потока будет Меняться от V max = 250 м/сек до V min= 170 м/сек. Как известно, подъемная сила элемента лопасти равна
Y эл= с у∙ S э∙ ρ∙ V 2 э/2
Нетрудно подсчитать, что подъемная сила левой половины несущего винта с жестко закрепленными во втулке лопастями в данном случае будет в 2,15 раза больше, чем подъемная сила правой половины, что неминуемо приведет к опрокидыванию вертолета.
Проследим, как работает в полете с поступательной скоростью одна из лопастей несущего винта вертолета на шарнирной подвеоке. Начнем с азимута 0°. В этой точке скорость конца лопасти относительно воздуха можно принять равной V окр= ω∙ R. в нашем случае 210 м/сек. Двигаясь дальше при вращении несущего винта, эта лопасть начинает обдуваться встречным потоком воздуха и в азимутальной точке 90° будет иметь скорость относительно воздуха 250 м/сек. Это максимальная скорость лопасти относительно воздуха. Условимся лопасть, идущую от азимутальной точки 0° к азимутальной точке 180°, называть наступающей лопастью, а идущую от азимутальной точки 180° к точке 0° через 270° — отступающей лопастью.
Подъемная сила у наступающей лопасти при отходе ее от точки 0° начинает увеличиваться вследствие роста скорости обтекания воздуха. Равновесие сил на лопасти нарушится, и увеличившаяся подъемная сила начнет поднимать лопасть вверх, поворачивая ее около оси горизонтального шарнира (рис. 35).
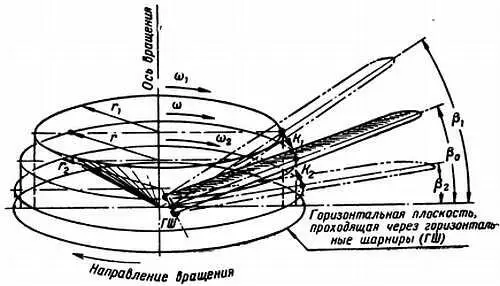
Рис. 35. Схема появления кориолисовой силы при взмахе лопасти несущего винта вверх
Одновременно вследствие возрастания лобового сопротивления наступающая лопасть начнет отставать от вращающейся втулки винта, поворачиваясь около вертикального шарнира в сторону заднего упора.
Однако подъем лопасти вверх и поворот ее назад будут очень небольшими вследствие мощного стабилизирующего влияния центробежной силы лопасти, устойчиво фиксирующей ее в пространстве.
Кроме того, при подъеме лопасти вверх из ее среднего положения вследствие уменьшения радиуса вращения центра тяжести лопасти на ней возникнет кориолисова сила К 1, направленная в сторону вращения (см. рис. 35).
Кориолисовы силы возникают в соответствии с законом сохранения энергии во всех тех случаях, когда у вращающегося тела изменяется разнос масс относительно оси вращения; при приближении вращающихся масс к оси вращения обороты тела возрастают, при удалении — уменьшаются.
Так, например, висящий под куполом цирка акробат, начав медленное вращение с разведенными в стороны руками и ногами, после их сведения так быстро начинает вращаться, что вызывает удивление и восхищение зрителей; парашютист, выполняя затяжной прыжок, в случае начавшегося вращения разбрасывает в стороны руки и ноги, прекращая этим опасное вращение (рис. 36). В обоих приведенных примерах показано умелое использование кориолисовых сил.
Рис. 36. Примеры использования кориолисовых сил
Но вернемся опять к лопасти вращающегося несущего винта вертолета и проследим за изменением аэродинамических <���и других сия, действующих на нее, а также за движением лопасти в пространстве за один оборот винта.
Итак, наступающая лопасть под действием возросшей подъемной силы за счет увеличения скорости обтекания начинает совершать взмах вверх от своего нейтрального положения.
В результате появления вертикальной скорости перемещения лопасти угол атаки сечения лопасти уменьшится, при этом снизится рост появившейся избыточной подъемной силы, а так как лопасть поводковым механизмом связана с автоматом-перекосом, положение которого будем считать неизменным, то при взмахе лопасти вверх уменьшится и ее установочный угол, что еще более уменьшит избыточную подъемную силу. Несмотря на это, подъемная сила вследствие роста скорости будет увеличиваться вплоть до азимутальной точки 90°, в которой скорость перемещения лопасти вверх достигнет своего максимума.
При дальнейшем вращении лопасти после точки 90°, несмотря на падение величины избыточной подъемной силы, лопасть все же будет продолжать движение вверх, но с убывающей скоростью. Своего верхнего положения лопасть достигнет, несколько пройдя азимутальную точку 180° вследствие сил инерции.
Став теперь отступающей лопастью, скорость обтекания которой становится меньше окружной скорости, она вследствие уменьшения подъемной силы и под действием центробежной силы и силы веса начнет движение вниз. При этом угол атаки ее сечения возрастет за счет вертикальной скорости движения вниз, а также за счет увеличения установочного угла лопасти по причине воздействия поводкового механизма автомата-перекоса.
Эти процессы будут поддерживать подъемную силу отступающей лопасти.
В азимутальной точке 270° скорость обтекания лопасти воздушным потоком будет наименьшей. Вертикальная скорость движения лопасти вниз будет иметь наибольшее значение. Низшее положение при взмахе вниз лопасть займет, несколько пройдя точку 0°.
Напомним, что кориолисова сила К 2у опускающейся лопасти в силу увеличения радиуса вращения ее центра тяжести будет направлена против вращения винта.
На рис. 37 показаны изменение углов атаки лопасти несущего винта за один его оборот и схема сил, действующих на элемент лопасти в четырех азимутальных точках.
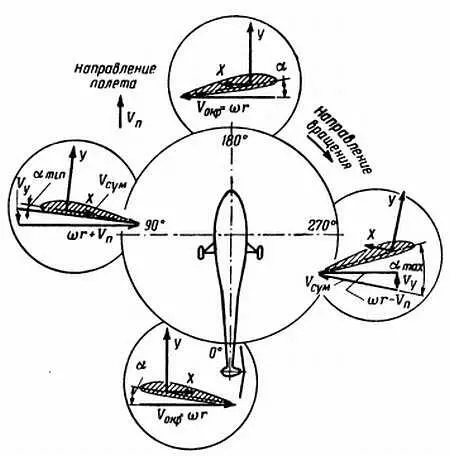
Рис. 37. Схема сил и изменение углов атаки лопасти за один ее оборот
На рис. 38 показано изменение установочного угла лопасти под воздействием поводкового механизма автомата-перекоса, называемого регулятором взмаха. Характеристики регулятора взмаха зависят от tg σ 1= b / a и для существующих вертолетов находятся в пределах от 0 до 1.
Читать дальшеИнтервал:
Закладка: