Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Интерфейс должен опознавать коды ошибок и не смешивать их с командами под номерами 5, 6 и 7. Для этого используется схема, состоящая из двух ИС И-НЕ типа 4011, включенных по схеме логических И и ИЛИ (как показано на рис. 7.8), которая обнаруживает коды ошибок 55, 66 и 77.
Соединение с платой УРР
Плата УРР имеет 9 отверстий под пайку, соединяющих ИС 74LS373 и 7448 для подключения схемы интерфейса (см. рис. 7.8). Восемь шин представляют 2 четырехбитных двоично-десятичных кода, девятая шина – земляная. Имеется контактная площадка красного светодиода. К этой площадке припаивается проводник, который является запускающим входом платы интерфейса.
Принцип работы устройства
Прежде всего интерфейс должен реагировать на любое слово, воспринятое УРР. Когда УРР «слышит» слово, оно пытается его распознать, что вызывает немедленное мигание светодиода.
Ток через светодиод используется для запуска интерфейса (реакция на слово). Для формирования импульса запуска используется компаратор, подключенный к катоду светодиода. Опорное напряжение составляет 3,64 В и формируется резистивным делителем 5,6 кОм и 15 кОм.
Выход компаратора имеет нормально высокий уровень. При поступлении импульса амплитудой 4,5 В с катода светодиода, на выходе компаратора формируется отрицательный импульс запуска. В качестве компаратора использован ОУ типа 741.
Процесс распознавания речи занимает до 300 мс. Во время этой задержки состояние двоично-десятичных выходов сохраняется неизменным. Если интерфейс работает слишком быстро, то он завершит обновление информации на выходе до появления входной информации, содержащейся в двоично-десятичных кодах.
Для предотвращения этого явления мы обеспечиваем задержку отрицательного импульса запуска, используя две ИС таймеров типа 555 (или одну ИС типа 556), включенных по схеме одновибратора. Отрицательный импульс с выхода компаратора запускает первый одновибратор, который выдает импульс длиной 470 мс, подаваемый на вход второго одновибратора. Второй одновибратор генерирует импульс длиной 220 мс.
Импульс длиной 470 мс предоставляет более чем достаточно времени для обновления выходов двоично-десятичного кода. Задний отрицательный фронт этого импульса запускает второй одновибратор, который выдает положительный импульс продолжительностью 220 мс. В это время происходит обновление выходов интерфейса при условии, что детектор кодов ошибок имеет высокий логический уровень на выходе.
Выход второго одновибратора (импульс 220 мс) соединен с одним из входов логического элемента И. Другой вход соединен с двумя другими логическими элементами (ИЛИ-НЕ и ИЛИ), которые образуют детектор кодов ошибок. Детектор кода ошибок соединен со старшим полубайтом двоично-десятичного кода. При наличии кода, соответствующего цифрам 5, 6 или 7 на входе детектора, он выдает низкий логический уровень на выходе. Для остальных цифр детектор имеет высокий выходной уровень. В этом случае позитивный импульс с выхода второго одновибратора запускает интерфейс для принятия младшего полубайта двоично-десятичного кода.
Высокий логический уровень на выходе детектора кода ошибок в комбинации с положительным импульсом с выхода второго одновибратора вызывает появление высокого уровня на выходе логического элемента И, что разблокирует ИС 74LS373. Когда ИС 74LS373 разблокирована, то код, содержащийся в младшем полубайте двоично-десятичного кода, поступает с ИС и записывается в ней. Четыре выхода ИС 74LS373 соединены с входами двоично-десятичного дешифратора 4028.
С другой стороны, если на выходе детектора кода ошибок присутствует сигнал низкого уровня, что происходит при наличии цифр 5, 6 или 7 в старшем разряде, то соответствующий выход элемента И имеет низкий уровень. В этом случае, при наличии положительного импульса от второго одновибратора на втором выводе логического элемента И, его выход по-прежнему имеет логически низкий уровень, тем самым ИС 74S373 блокируется, и информация младшего разряда не поступает на дешифратор 4028.
Таким путем, детектор кода ошибок отделяет числа 55, 66 и 77 от команд под номерами 5, 6 и 7.
При прохождении двоично-десятичного кода через ИС 74LS373, он поступает на вход дешифратора 4028. Дешифратор считывает данный код и выдает сигнал высокого уровня на соответствующей шине выхода (с номерами от 0 до 9).
Усовершенствование выхода интерфейса
Выходы высокого логического уровня ИС 4028 можно использовать для управления нагрузками переменного и постоянного тока. Однако лучшим вариантом является подключение выходов 4028 к триггерам. Дело в том, что в конкретный момент на выходе ИС 4028 присутствует единственный сигнал высокого уровня. По этой причине если в какой-то момент один из выходов включается, то сигнал на выходе, задействованном до того, пропадает, что представляет определенное неудобство. Наличие триггера позволяет решить эту проблему. При первом включении на выходе триггера появится сигнал высокого уровня, который сохранится до подачи на него следующего импульса. Такая схема позволит осуществлять двойное управление (включение и выключение) с помощью одной команды.
Первоначально имеется возможность активировать любое количество выходов без риска сброса уже включенных. Затем та же самая команда может быть использована для включения нагрузки (при первом произнесении) и затем ее выключения (при следующем произнесении). Таким образом, вместо использования пары команд для включения/выключения устройства (например: включить свет/выключить свет) возможно использование единственной команды, которая в «четный» раз выключает устройство (свет-свет). В некоторых случаях это позволяет удвоить список допустимых команд.
На рис. 7.9 показана схема триггера на ИС 4013. Каждая ИС содержит два триггера. Входы триггеров соединены непосредственно с выходами ИС 4028.
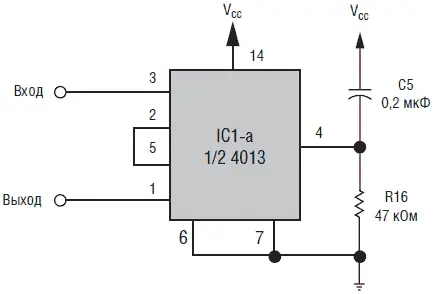
Рис. 7.9. Половина триггера 4013 для запоминания сигнала. Соединяется непосредственно с выходом ИС 4028, изображенной на рис. 7.8, и предназначена для сохранения включенного состояния схемы при включении следующей команды
На рис. 7.10 изображена одна схема и два фрагмента схем присоединения к выходу триггера для управления нагрузками различных типов. На части А изображен Дарлингтоновский NPN транзистор, управляющий резистивной нагрузкой в цепи постоянного тока. Подобная схема может быть использована для управления электромагнитным реле, как показано в В. Реле, соответственно, может управлять цепями постоянного или переменного тока. В части С выход 4013 соединен с оптопарой, управляющей симистором.
Читать дальшеИнтервал:
Закладка:








