Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
• Ручные ножницы по металлу. Используются для резки листового металла. Я бы рекомендовал ножницы размером 75 см. Процесс резки аналогичен использованию обычных ножниц. Примечание: резка металла значительно труднее резки бумаги.
• Тиски . Используются для фиксации металлических деталей для сверления и сгибания.
• Дрель
• Молоток
Вы можете найти эти инструменты практически в любом магазине слесарного оборудования. Там же можно найти тонкие листы металла и алюминиевые полосы, необходимые для изготовления шасси.
Я изготовил шасси из прямоугольной алюминиевой полосы сечением 3х 12 мм и листа нержавеющей стали толщиной 0,6 мм. Нержавеющая сталь хуже поддается обработке в сравнении с обычным холодным листовым прокатом, поэтому в следующий раз я предпочел бы алюминий или прокат.
Ходовой двигатель представляет собой двигатель с редуктором 100:1 (см. рис. 8.1). Мне нравится этот двигатель, поскольку он имеет скобу для крепления. Для поворотного двигателя я использовал стандартный сервомотор с усилием на валу 1,3 кгс. Для шасси потребуются три куска листового металла.

Рис. 8.1. Двигатель постоянного тока 1,5–3 В с редуктором 100:1
Ходовой двигатель и переднее колесо закреплены на П-образном швеллере (см. рис. 8.2). П-образный швеллер изготовлен из стальной полосы размерами 25 мм на 125 мм и толщиной 0,4 мм. В центре полосы необходимо просверлить три отверстия для крепления фланца сервомотора. Диаметр центрального отверстия (3 мм) больше диаметра крайних отверстий (1,5 мм). Отсоедините фланец от сервомотора путем выворачивания центрального винта и вытягивания фланца вверх. Положите фланец на скобу швеллера и разметьте положения центрального и боковых отверстий. Просверлите три отверстия. Присоедините фланец к сервомотору и заверните центральный винт. Для крайних отверстий используйте винты с гайками диаметром 3 мм. Просверлите три отверстия 3,1 мм для бокового крепления Г-образной скобы ходового двигателя. Просверлите два соосных отверстия диаметром 3 мм для крепления переднего колеса.
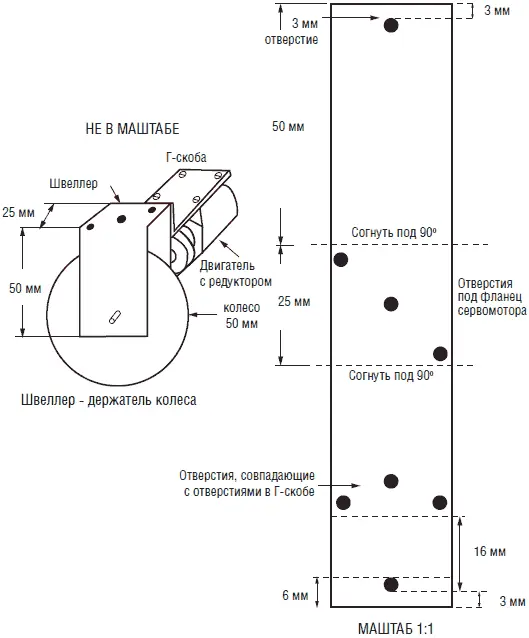
Рис. 8.2. П-образная скоба крепления ведущего колеса
Зажмите полосу в тиски и согните ее концы под углом 90°, чтобы получилась П-образная скоба.
Используйте Г-образную скобу для крепления ходового двигателя к П-образному швеллеру (см. рис. 8.3). Размеры Г-образной скобы 38х 76 мм. Наметьте отверстия на пластине согласно положению соответствующих отверстий на корпусе редуктора. Убедитесь, что три отверстия на Г-образной скобе соответствуют отверстиям на П-образной скобе швеллера.
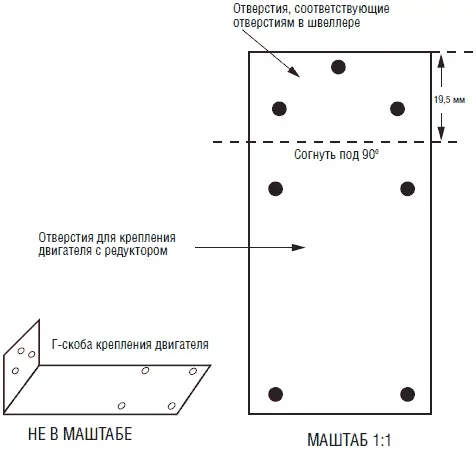
Рис. 8.3. Г-образная скоба крепления редуктора к П-скобе
На рис. 8.4 изображен чертеж основания с изображением позиции сервомотора с крутящим моментом 1,3 кгс. Размеры основания 76х140 мм. На основании будут смонтированы источник питания и электрическая схема. Для вырезания отверстия под сервомотор воспользуйтесь чертежом.
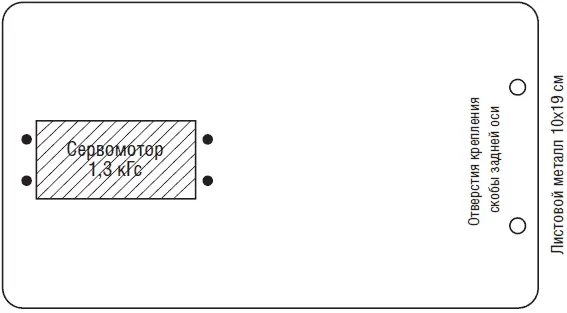
Рис. 8.4. Чертеж основания конструкции с вырезом под сервомотор с крутящим моментом 1,3 кгс и отверстиями под скобу крепления задней оси
Сперва просверлите четыре отверстия диаметром 3 мм по краям прямоугольника. Затем высверливайте отверстия по сторонам прямоугольника. Такой способ существенно легче, чем выпиливание или «выкусывание» металла по периметру необходимого отверстия. После высверливания отверстия для подравнивания краев можно использовать кусачки. Окончательная обработка краев производится напильником, после чего можно монтировать сервомотор. Просверлите сзади два отверстия для крепления скобы задней оси.
Чертеж скобы крепления задней оси приведен на рис. 8.5. Она изготовлена из алюминиевой полосы размерами 3х12х250 мм. Перед сгибанием просверлите в алюминиевой полосе четыре отверстия диаметром 3 мм. Для задней оси я использовал проволоку от вешалки для одежды.

Рис. 8.5. Скоба крепления задней оси
Потом мы должны закрепить переднее ведущее колесу на оси редуктора ходового двигателя. Я использовал резиновое колесико, садящееся с трением на ось 3 мм, а диаметр вала редуктора 100:1 ходового двигателя составляет 2 мм.
Для решения этой проблемы я насадил на ось 75 мм отрезок пустотелой металлической трубки с внешним диаметром 3 мм. Для насаживания 3-миллиметровой трубки на 2-миллиметровый вал я использовал шлицевую отвертку и молоток. Чтобы не повредить шестерни редуктора, я положил вал с надетой на него трубкой на гладкую металлическую поверхность. Затем, поставив жало отвертки на трубку, аккуратными ударами молотка по отвертке немного сжал трубку, что должно обеспечить хорошее сцепление между валом и трубкой. Для надежного исключения проскальзывания достаточно сплющить трубку в двух – трех местах.
Если посмотреть внимательно на вал редуктора, то можно заметить плоскую канавку на поверхности вала. Если аккуратно сплющить трубку по канавке, то можно добиться очень надежного крепления трубки.
Ведущее колесо просто надевается на 3-миллиметровую трубку. Трения между колесом и осью достаточно, чтобы вращение колеса и движение робота осуществлялось без проскальзывания. Если вы хотите постоянно закрепить колесо на оси (чего я обычно не делаю), то достаточно развести немного эпоксидного клея и нанести его на ось перед надеванием колеса.
Когда ходовой двигатель закреплен на одной стороне П-образной скобы, то он своим весом разбалансирует конструкцию. Для ее балансировки необходимо закрепить от 100 до 125 г свинца на противоположной стороне скобы. Я применил кусочки свинца толщиной 3 мм, которые ранее использовал для хранения радиоактивных изотопов. Резка и сверление свинца не представляет трудности. Понятно, что для балансировки вы можете прикрепить любой подходящий тяжелый предмет (как это делается в барабане стиральной машины).
В оригинальной конструкции робота черепахи был использован прозрачный пластиковый панцирь. Панцирь был соединен с выключателем, который при срабатывании переключал схему робота в режим «убегания». Я испробовал несколько типов конструкций, но остался неудовлетворен ими. В конце концов, мне ничего не оставалось, как создать свою конструкцию панциря.
Читать дальшеИнтервал:
Закладка:








