Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Вместо того чтобы делать цельный панцирь, я изготовил бампер, опоясывающий робота. Бампер изготовлен из алюминиевой полосы размерами 3х12х810 мм (см. рис. 8.6). Центр полосы и каждый изгиб отмечены с помощью карандаша. Полосу необходимо зажать в тиски и изогнуть в требуемых местах на нужный угол. Два конца полосы сходятся в задней части бампера. Эти концы скрепляются вместе с помощью отрезка полосы размерами 3х12х25 мм. В каждом из концов полосы сверлится отверстие диаметром 3-миллиметров. Соответствующие отверстия сверлятся на концах бампера. Полоса скрепляется с бампером с помощью двух 3-миллиметровых винтов с гайками (см. рис. 8.7).
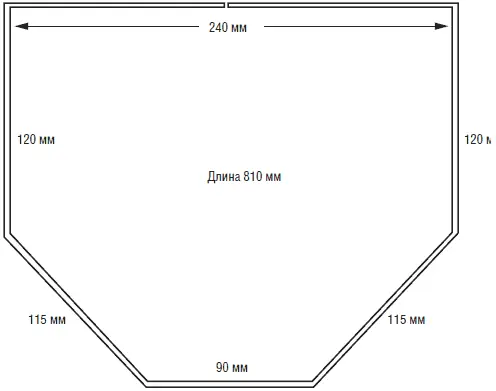
Рис. 8.6. Размеры бампера, согнутого из алюминиевой полосы 3х12х815 мм
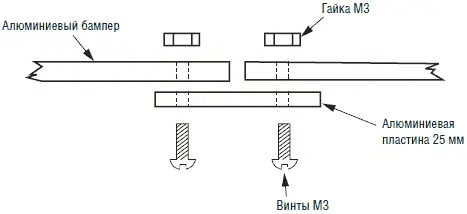
Рис. 8.7 Детальный вид части алюминиевой полосы в месте соединения концов бампера
Для крепления бампера к роботу используется верхняя скоба, повторяющая размеры и форму передней части бампера (см. рис. 8.8). Верхняя скоба изготовлена из алюминиевой полосы размерами 3х12х370 мм. Аналогично бамперу центр полосы и места необходимых изгибов отмечены карандашом. Полоса изгибается в тисках таким же образом, как и бампер.

Рис. 8.8. Боковой вид верхней скобы, изготовленной из алюминиевой полосы 3х12х370 мм
Очень важно найти линию центра тяжести бампера, поскольку она будет являться наилучшим местом прикрепления верхней скобы. Поставьте бампер на торец алюминиевой полосы. Подвигайте его в разные стороны до нахождения положения равновесия. Отметьте карандашом соответствующие места на боковых сторонах бампера. Просверлите на каждой стороне отверстие диаметром 3 мм. Соответствующие отверстия просверлите на концах верхней скобы. Прикрепите верхнюю скобу к бамперу при помощи 3-миллиметровых винтов с гайками.
Бампер прикрепляется к «телу» робота с помощью верхней скобы. Просверлите три отверстия диаметром 3 мм в верхней части скобы. Одно отверстие сверлится по центру; два других на расстоянии 28 мм от центра (см. рис. 8.9). Три соответствующих отверстия нужно просверлить в основании робота за сервомотором. Положение отверстий должно быть выбрано таким образом, чтобы зазор между бампером и задними колесами лежал в переделах 3–6 мм. Положение соответствующего центрального отверстия на основании должно быть передвинуто вперед примерно на 6 мм.
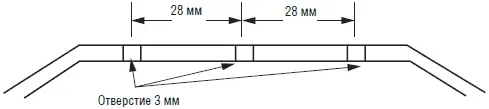
Рис. 8.9. Боковой вид расположения отверстий в горизонтальной части верхней скобы
Скоба крепится к основанию при помощи двух 3-миллиметровых винтов длиной 25 мм, четырех гаек 3 мм, и двух пружин длиной 25 мм, внутренним диаметром 3 мм и усилием натяжения порядка 900 г (см. рис. 8.10). Жесткость крепления бампера может быть отрегулирована затягиванием или отпусканием крепежных гаек. После установки бампера, при касании или столкновении робота с препятствием бампер будет отклоняться назад и замыкать контакты выключателя.
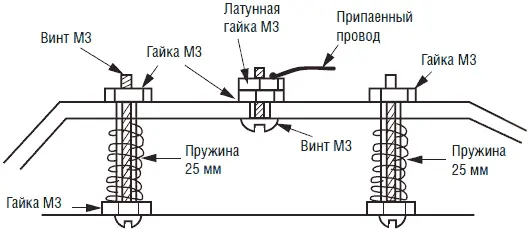
Рис. 8.10. Боковой вид крепления верхней скобы к основанию робота при
Для изготовления выключателя использованы центральные отверстия в верхней скобе и основании робота. Как видно из рис. 8.10, в центральное отверстие скобы вставлен винт 3 мм, затянутый обычной оцинкованной гайкой и дополнительной латунной контргайкой. К латунной гайке припаян контактный провод. Такая конструкция обеспечивает надежный электрический контакт между проводом и скобой бампера. Латунная гайка используется потому, что к ней легко надежно припаять проводник. Обычные оцинкованные гайки с трудом поддаются пайке, что снижает надежность электрического контакта.
Другая половина выключателя состоит из пластмассового винта 3 мм длиной 25 мм и трех гаек, одна из которых латунная и к которой припаивается второй контактный провод выключателя (см. рис. 8.11). На рис. 8.12 изображен чертеж выключателя в сборе. Регулировка выключателя заключается в том, чтобы расположить нижнюю контактную латунную гайку непосредственно под верхней алюминиевой скобой, но без взаимного касания. Когда верхняя скоба наклоняется вперед, то она касается латунной гайки, замыкая, таким образом, электрический контакт.
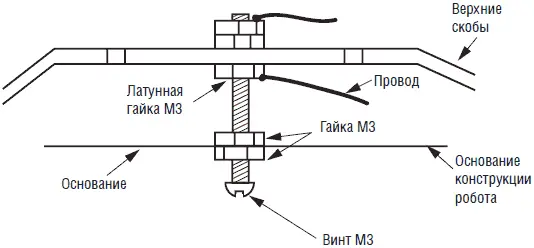
Рис. 8.11. Боковой вид датчика «касания» (половина датчика на основании робота), пластиковый винт с верхней латунной гайкой

Рис. 8.12. Детальная фотография крепления датчика «касания» и пружинной подвески верхней скобы
В моем прототипе устройства использованы CdS фоторезисторы с темновым сопротивлением порядка 100 кОм и сопротивлением на свету порядка 10 кОм. Наилучшим местом для закрепления фоторезисторов является верхняя часть 100:1 редуктора ходового двигателя (см. рис. 8.13). Для крепления фоторезисторов я использовал небольшую пластиковую пластинку, закрепленную под углом 45° вверх и светонепроницаемый козырек, помещенный между фоторезисторами (см. рис. 8.14). Закрепление фоторезисторов на площадке переднего колеса автоматически обеспечивает совпадение направления приема светового излучения с направлением движения. Такой тип повторяет конструкцию оригинальной черепахи робота.
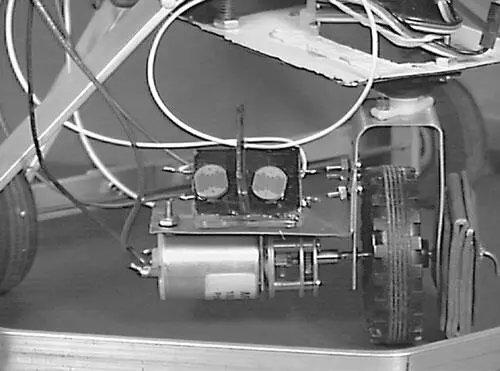
Рис. 8.13. Детальная фотография конструкции узла переднего ведущего колеса, содержащая противовес, ведущее колесо, двигатель с редуктором и датчики освещенности
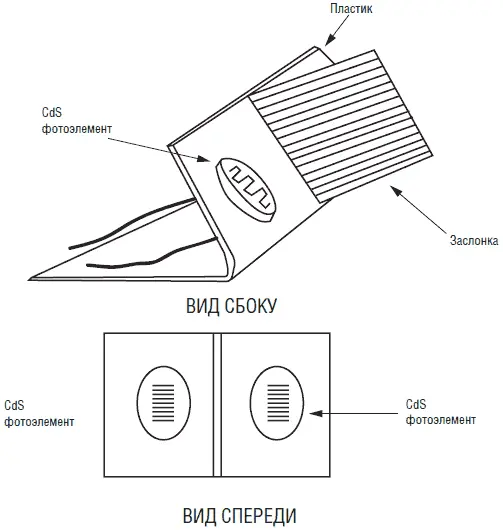
Рис. 8.14. Изометрический вид блока датчиков
Использование двух CdS фоторезисторов сильно облегчает вычисления, необходимые для решения задачи следования за источником света. Для этого требуется алгоритм, аналогичный алгоритму действия устройства системы слежения за направлением источника света, описанный в гл. 6. Работа блока фоторезисторов проиллюстрирована на рис. 8.15. Когда оба датчика освещены одинаково, то их сопротивления приблизительно равны. Если разность показаний каждого их датчиков не превышает ±10 единиц, программа PIC полагает их равными и не отдает команду на устройство поворота. Когда один из датчиков попадает в тень источника света, то разность сопротивлений превышает ±10 единиц. Соответственно PIC микроконтроллер включает устройство поворота для обеспечения равной освещенности датчиков. При этом переднее колесо поворачивается, и робот движется прямо к источнику света. Если освещенность превышает пороговую, то робот переходит в режим «избегания».
Читать дальшеИнтервал:
Закладка:








