Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
goto start
lt: ‘Поворот налево, посылка
low 0: high 1: low 2 ‘Сообщение микроконтроллеру 2
goto start
slp: ‘Режим спячки, посылка
low 0: low 1: low 2 ‘Сообщение микроконтроллеру 2
goto start
avoid: ‘Режим избегания, посылка
low 0: low 1: high 2 ‘Сообщение микроконтроллеру 2
goto start
Программа 2
‘Микроконтроллер 2
b4 = 150 ‘Установка среднего положения сервомотора
start:
peek 6, b1 ‘Чтение данных микроконтроллера 1
let b0 = b1 & 7 ‘Маскирование кроме первых трех битов
if b0 = 0 then slp ‘Время спячки
if b0 = 1 then rt ‘Поворот направо
if b0 = 2 then lt ‘Поворот налево
if b0 = 3 then fw ‘Движение прямо
if b0 = 4 then avoid ‘Режим избегания
goto start
slp:
low 4: low 5 ‘Выключить двигатель
pulsout 3, b4 ‘Запустить сервомотор
pause 18 ‘Задержка включения сервомотора
goto start ‘Чтение данных микроконтроллера 1
rt: ‘Поворот направо
high 4: low 5 ‘Движение вперед
if b4 > 200 then rt1: ‘Поворот направо максимален
b4 = b4 + 1 ‘Нет
rt1: ‘Да
pulsout 3, b4 ‘Поворот сервомотора
pause 18 ‘Задержка ( 55 Гц)
goto start ‘Чтение данных микроконтроллера 1
lt: ‘Поворот налево
high 4: low 5 ‘Движение вперед
if b4 < 100 then lt1: ‘Поворот налево максимален
b4 = b4 – 1 ‘Нет
lt1: ‘Да
pulsout 3, b4 ‘Поворот сервомотора
pause 18 ‘Задержка (55 Гц)
goto start ‘Чтение данных микроконтроллера 1
fw: ‘Прямо
high 4: low 5 ‘Движение прямо
pulsout 3, b4 ‘Поворот сервомотора
pause 18 ‘Задержка (55 Гц)
goto start ‘Чтение данных микроконтроллера 1
avoid:
low 4: high 5 ‘Движение назад
if b4 > 150 then vr ‘Проверка. Перемена направления направо?
if b4 <= 150 then vl ‘Проверка. Перемена направления налево?
vr: ‘Перемена направления вправо
b5 = b4 – 30 ‘Направление поворота
for b6 = 1 to 120 ‘Цикл задержки 2 с
pulsout 3, b5 ‘Поворот сервомотора
pause 18 ‘Задержка (55 Гц)
next b6 ‘Конец цикла
goto start ‘Чтение данных микроконтроллера 1
vl: ‘Перемена направления влево
b5 = b4 + 30 ‘Направление поворота
for b6 = 1 to 120 ‘Цикл задержки 2 с
pulsout 3, b5 ‘Поворот сервомотора
pause 18 ‘Задержка (55 Гц)
next b6 ‘Конец цикла
goto start
Фотография конструкции робота в сборе показана на рис. 8.18
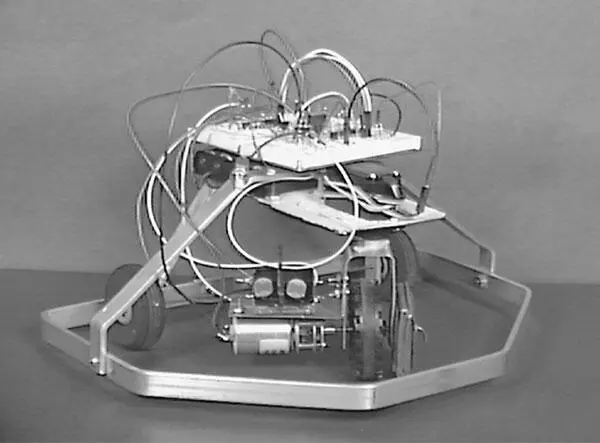
Рис. 8.18. Вид спереди готовой конструкции
Поведение
Для нормального функционирования робота необходима достаточно низкая общая освещенность, на фоне которой выделяется один яркий источник света. Для моего робота потребовался столь низкий уровень общей освещенности, что мне пришлось изготовить из цветного пластика два небольших светофильтра, чтобы снизить поток света, попадающего на CdS фотоэлементы.
Робот-прототип демонстрирует следующее поведение. При равномерном освещении (нет отдельного яркого источника) робот движется по прямой или описывает круги, в зависимости от наличия ярких источников в предыдущие моменты времени. При слишком большой общей освещенности он откатывается назад. Если имеется источник средней интенсивности, то он «находит» его и движется прямо по направлению к этому источнику.
Программа может быть доработана для исследования более интересных и экзотических типов поведения. Перед тем как это делать, давайте посмотрим, как работает стандартная программа. Программа 1 микроконтроллера 1 первоначально опрашивает датчики и посылает информацию в микроконтроллер 2. В этой программе вы можете изменить чувствительность датчиков, чтобы подстроиться под имеющийся датчик. Для этого необходимо изменить строки:
if b0 <= 250 then skip ‘Достаточно темно?
If b1 >= 250 then slp ‘Да
skip: ‘Нет
Максимальное значение показаний датчика может быть равно 255 (полная темнота). Это значение можно увеличить, чтобы поднять средний уровень освещенности для «спячки».
Уровень освещенности, необходимый для включения режима избегания, можно изменить с помощью строк:
if bo > 25 then skip 2 ‘Слишком много света
if b1 < 25 then avoid ‘Да
skip2: ‘Нет
Увеличение значения, которое в данном случае равно 25, снизит уровень освещенности, при котором робот перейдет в режим избегания. В свою очередь уменьшение численного значения повысит интенсивность света для режима избегания. В большинстве случаев вы захотите уменьшить численное значение параметра. Однако я бы не советовал уменьшать его ниже 9, поскольку даже в режиме полного насыщения сопротивление CdS фотоэлементов никогда не падает до нуля. Моя проверка показала, что сопротивление при полном насыщении не падает ниже 5 единиц.
Пороговая разность показаний двух CdS фоторезисторов может быть увеличена или уменьшена изменением соответствующего параметра в процедурах greater и lesser.
greater:
b2 = b0 – b1
if b2 > 10 then rt
goto straight
lesser:
b2 = b1 – b0
if b2 > 10 then lt
goto straight
В дополнение к этому возможно создание преимущественного направления поворота робота (право– или леворукости) через изменение параметров процедур greater и lesser, но не обеих одновременно. Это означает, что робот будет поворачиваться в одном направлении более «охотно», чем в другом. Например, если мы заменим строку if b2 > 10 then lt в процедуре lesser на if b2 > 15 then lt, то наш робот более охотно будет поворачиваться направо.
Конструкция робота предоставляет много возможностей для экспериментаторов в области робототехники как с точки зрения самой конструкции, так и ее программного обеспечения.
Список компонентов для робота-черепахи Вальтера
• (1) 300x300 мм лист металла толщиной 0,4–0,6 мм
• (1) 3х 12х 300 мм алюминиевая полоса
• (1) сервомотор с крутящим моментом 1,3 кгс
• (1) двигатель с редуктором 1:100
• винты и гайки 3 мм
• винты и гайки 2 мм
• (1) 3х 12х 810 мм алюминиевая полоса
• (1) 3х 12х 370 мм алюминиевая полоса
• (1) 3х 12х 50 мм алюминиевая полоса
• (1) стандартный сервомотор с крутящим моментом 1,3 кгс
• (1) двигатель постоянного тока с редуктором 100:1
• (1) ведущее колесо 51 мм под ось 3 мм
• (1) трубка (сталь, латунь) внешний диаметр 3 мм, внутренний диаметр 2 мм
• (2) фоторезистор CdS, темновое R – 100 кОм, световое R – 10 кОм
• (4 Q1-Q4) транзистор NPN 2N2222
• (4 D1-D4) диод 1N914
• (1 D5) светодиод красный
• (4 R1-R4) резистор 1 кОм, 0,25 Вт
• (6 R5-R7, R9-R11) резистор 10 кОм, 0,25 Вт
• (1 R8) резистор 470 Ом, 0,25 Вт
• (4) конденсатор 22 пФ
• (2 C1, C2) конденсатор 0,1 мкФ
• (2 X1, X2) кварцевый резонатор 4 МГц
• (1 Q5) регулятор напряжения 7805
• (2 IC1, IC2) микроконтроллер PIC16F84-04
• Комплектующие: винты 3 мм, пластиковые винты 3 мм длиной 25 мм, гайки латунные 3 мм, пружины длиной 25 мм (усилие 800 грамм)
Поставщики
• Алюминиевые полосы, винты, трубки, пружины можно приобрести в соответствующих магазинах.
• Сервомоторы можно приобрести в специализированных магазинах или заказать у дистрибьюторов.
• Микроконтроллер PIC и переднее ведущее колесо можно заказать в компании Images Company.
Читать дальшеИнтервал:
Закладка:








