Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Подструктура системы
Мы будем конструировать нашего робота на основе модели радиоуправляемого автомобиля. В идеальном случае модель должна иметь систему пропорционального управления ходом и поворотами автомобиля. В нашем прототипе используется именно такая модель автомобиля. Могут быть использованы более дешевые модели, но они обеспечивают худшее качество управления.
На рис. 9.2 приведена фотография радиоуправляемого автомобиля, снабженного пружинной системой подвески. Чтобы обеспечить «чувство» поверхности, система может быть снабжена датчиками наклона и неровностей дороги (тряски). В данном случае мы забегаем немного вперед.

Рис. 9.2. Модель радиоуправляемого автомобиля, используемого в системе телеслежения
Приобретите модель автомобиля, работающего на аккумуляторах и имеющего зарядное устройство. Для некоторых моделей радиоуправляемых автомобилей эти устройства можно приобрести отдельно.
Немного о радиоуправляемых автомобилях
Радиоуправляемые модели превратились в популярное хобби. Существуют радиоуправляемые модели самолетов, вертолетов, планеров, катеров, подводных лодок, автомобилей, мотоциклов и т. д. Каркасы и системы пружинной подвески большинства моделей подходят для создания на их базе роботов «Големов».
Еще недавно большинство моделей работало на жидком топливе. В конце 70-х годов развитие технологии производства электрических батарей и двигателей сделало модели, работающие на электрической энергии, более популярными.
В моделях радиоуправляемых автомобилей обычно используются двухканальные системы управления «приемник/передатчик». По одному каналу осуществляется управление поворотами, а по другому – «педалью» акселератора. Каждый сигнал передатчика управляется переменным резистором на панели передатчика. Потенциометр, управляющий поворотом модели, часто соединяют с небольшим рулевым колесом на корпусе передатчика. Потенциометр акселератора часто соединяют с рукояткой или джойстиком.
Микросхема кодера передатчика модулирует несущую с помощью импульсов переменной ширины. Ширина импульсов зависит от положения (сопротивления) движка переменного резистора. Ширина модулирующих импульсов изменяется от 1 до 2 мс (см. рис. 9.3). В среднем положении движка ширина импульсов составляет 1,5 мс. В одном крайнем положении ширина импульсов достигает 2 мс. В другом крайнем положении импульсы сокращаются до 1 мс.
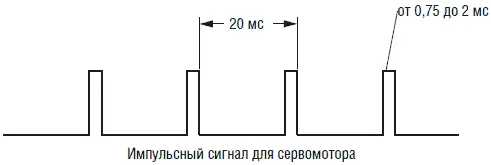
Рис. 9.3. Последовательность импульсов ШИМ для управления работой сервомотора
Декодер приемника обрабатывает импульсы и посылает соответствующие команды на управляющие сервомоторы. Сервомотор представляет собой интегральную конструкцию, состоящую из двигателя, редуктора, выходного вала и печатной платы управления. Управляющая схема печатной платы внутри сервомотора генерирует соответствующие импульсы на основании сопротивления внутреннего потенциометра, соединенного с выходным валом сервомотора. Управляющая ИС сравнивает импульсы внутренней схемы сервомотора и импульсы, приходящие с декодера приемника. Поворотом оси вала сервомотора длительность этих импульсов уравнивается. Таким образом, сервомотор изменяет и отслеживает положение вала ротора в соответствии с сигналом передатчика.
Глаза
Глазом (или глазами) для нашего робота телеслежения служит миниатюрная цветная видеокамера с каналом звукового сопровождения (см. рис. 9.4). Комплект видеокамеры включает приемник и передатчик диапазона 2,4 ГГц. Цена подобной системы примерно $99,95.

Рис. 9.4. Цветная видеокамера со звуковым сопровождением и передатчик диапазона 2,4 ГГц
Размеры самой камеры невелики. Она прикреплена к корпусу передатчика с помощью небольшого уголкового кронштейна. Размеры видеокамеры достаточно малы, поэтому возможна установка комплекта из двух камер на расстоянии примерно 63 мм между объективами (это соответствует среднему расстоянию между глазами) по бокам робота. Установка пары подобных камер позволит оператору получать более реалистичные стереоизображения. В устройстве-прототипе мы используем только одну камеру; позже мы обсудим возможности усовершенствования конструкции с добавлением «стереозрения», которое позволит через восприятие глубины пространства улучшить эффект «присутствия» и управление устройством.
Первоначальная модель нашего устройства содержит одну миниатюрную видеокамеру со звуковым сопровождением. Конструкция собрана по модульному принципу, поэтому если читатель захочет потом ввести стереосистему «зрения», то он может использовать уже имеющееся видеооборудование.
Конструкция
Конструирование робота начинается с поиска подходящего шасси от радиоуправляемого автомобиля. Большинство моделей радиоуправляемых автомобилей имеют внешний декоративный корпус, который придает им вид настоящего автомобиля, грузовика, вездехода и т. д. Удалите внешний декоративный корпус и крепите необходимые детали непосредственно к шасси.
Миниатюрная цветная камера робота Голем I требует отдельного источника питания (см. рис. 9.5). Для батареи 6 В изготавливается отдельный батарейный отсек, питающий видеокамеру и передатчик. Энергии свежих элементов АА должно хватать примерно на 4–6 часов непрерывной работы.

Рис. 9.5. Батарейный отсек 6 В для четырех элементов АА
Для облегчения установки и сохранения модульного принципа мы будем широко использовать самоклеющуюся ленту Velcro («липучка»). Материал Velcro обычно имеется в продаже в виде полос длиной, кратной 30 см. Лента Velcro имеет вид двух полос, скрепленных между собой. Каждая из полос имеет клейкий слой и на обратной стороне. Одна из полос крепится к соответствующему месту шасси, а другая – к детали, которую необходимо прикрепить.
Видеосистема 2,4 ГГц
Передатчик на 2,4 ГГц является интегральной частью цветной видеокамеры (см. рис. 9.6). Приемник на 2,4 ГГц представляет собой отдельный блок. Блок приемника имеет два разъема типа RCA для видео– и аудиовыхода. Эти разъемы соединены с помощью RCA кабелей с входами телевизора, монитора или видеомагнитофона.

Рис. 9.6. Система видеокамеры, передатчик и приемник
Читать дальшеИнтервал:
Закладка:








