Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Видеокамера может быть установлена на шасси двумя способами. На рис. 9.7 показаны видеокамера и передатчик, прикрепленные к батарейному отсеку. Вы можете начать с фиксированного положения камеры или видеокамера может быть установлена на крышке сервомотора для обеспечения ее поворота и слежения. Понятно, что установка сервомотора является более сложной и требует отдельного канала радиоуправления для панорамирования камеры вправо и влево. В устройствах наибольшей достоверности передачи информации панорамирование камеры должно быть связано с отслеживанием поворота головы оператора. Таким образом, если оператор поворачивает голову вправо или влево, то камера передвижного робота панорамирует вправо или влево синхронно с движениями головы. Для правильной работы подобной системы оператору необходим специальный шлем-дисплей виртуальной реальности, что является очень сложной задачей. Я бы советовал для простоты конструкции сперва использовать неподвижно закрепленную видеокамеру.

Рис. 9.7. Цветная видеокамера и батарейный отсек в сборе, готовые к размещению на модели автомобиля
Для неподвижного крепления вам потребуется небольшая полоска Velcro, приклеенная ко дну батарейного отсека видеокамеры. Другая полоска соответственно прикреплена к шасси радиоуправляемого автомобиля. Конструкция робота Голема в сборе показана на рис. 9.8.
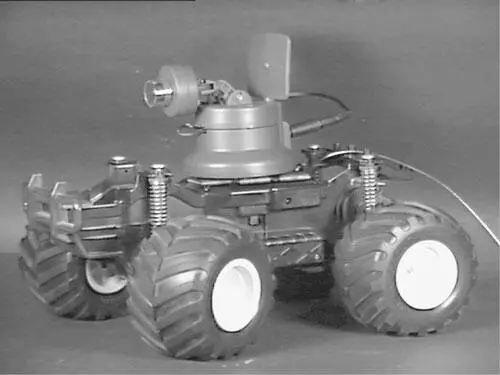
Рис. 9.8. Цветная видеокамера установленная на модели автомобиля
Управление через систему телеслежения
Вы можете управлять автомобилем дистанционно, используя систему радиоуправления, и при этом смотреть на экран телевизионного монитора. Видеокамера снабжена микрофоном, поэтому в процессе управления вы можете слышать окружающие звуки.
Разговор
Вы можете приобрести пару недорогих портативных радиостанций для детей типа walkie-talkie. Поместив одну из станций на шасси робота, вы можете говорить «с борта» робота.
Реалистичная система управления
В роботе Голем I использована стандартная система радиоуправления, входящая в комплект модели автомобиля. Реалистичность телеслежения можно значительно увеличить путем введения реалистично выглядящих органов управления. Это несложно сделать. Извлеките управляющие резисторы из корпуса передатчика и соедините один из них с импровизированным рулевым колесом, а другой – с педалью акселератора.
Усовершенствование системы телеслежения
При некотором размышлении базовая модель системы телеслежения Голем I может быть значительно усовершенствована. Понятно, что усовершенствования приведут к некоторому удорожанию устройства. Тем не менее подобные подсистемные усовершенствования можно делать постепенно.
Стереозрение
Стоит попытаться снабдить робота Голем I системой цветного «зрения» высокой четкости. Данная попытка дает системе много дополнительных преимуществ, в частности восприятие глубины пространства. Это является областью, куда все еще возможно внести значительный вклад. Перед тем как приступать к осуществлению проекта, необходимо четко понять, что для просмотра стереоизображений с «борта» робота необходима специальная система, обеспечивающая режим подобного просмотра.
Небольшой размер миниатюрных стереокамер очень подходит для синтеза стереоизображения. Подобные камеры могут быть размещены в один ряд на расстоянии, соответствующем среднему расстоянию между глазами человека. Для большей определенности, среднее расстояние между глазами у взрослого человека составляет примерно 63 мм. Для восприятия глубины пространства объективы камер могут быть расположены на таком же расстоянии от центра до центра для имитации глаз человека. Передатчики обоих камер должны быть необходимо настроены на разные частоты. Это позволит специальному телевизионному дисплею передавать левое изображение в левый глаз, а правое изображение – в правый глаз.
Стереоизображения, получаемые с борта Голема, позволят оператору воспринимать глубину пространства в то время, когда он или она управляют устройством. Стереозрение становится гораздо более важным при необходимости восприятия глубины пространства, например при использовании искусственной руки робота. Возможность зрительного контроля положения манипулятора (руки робота) по оси Z в трехмерном пространстве (оси X,Y и Z) в большой степени увеличивает эффективность управления.
Для оператора достаточно затруднительно эффективно управлять манипуляторами (руками робота) при отсутствии Z-измерения глубины в монокулярном зрении. В этом случае оператор вынужден слегка толкать манипулятором предметы, чтобы точно определить положение руки-манипулятора по оси Z.
То же самое происходит при дистанционном управлении автомобилем через систему телеслежения. При потере восприятия глубины становится затруднительным определение расстояний до объектов впереди автомобиля.
После установки стереосистемы оператор будет видеть трехмерное изображение пространства перед автомобилем. Однако это в этом передаваемом стереоизображении будет отсутствовать очень важная информация, соответствующая конвергентным движениям глаз. Мы получаем информацию о расстоянии до объекта во многом благодаря именно конвергенции (сближению) глаз. Конвергенцией называется схождение оптических осей глаз при их повороте внутри глазных орбит при рассматривании того или иного объекта. При рассматривании очень близких объектов глаза необходимо повернуть «внутрь». Напротив, при рассматривании очень удаленных объектов направление осей глаз будет почти параллельным. Мозг автоматически учитывает эти движения при расчете расстояния до объекта.
Стереовидеокамеры находятся в фиксированном положении и направлены прямо вперед. Чтобы добавить возможность «конвергенции» видеокамер, необходимы устройства, отслеживающие положение глаз. Устройство отображения стереоизображений должно быть снабжено блоком обратной связи, постоянно отслеживающим положение глаз оператора. Полученная информация должна быть передана на сервомоторы, на которых установлены видеокамеры, для сближения оптических осей этих видеокамер пропорционально конвергенции глаз оператора.
Такая система по типу «ведущий-ведомый», насколько я знаю, еще не создана. Точность ее исполнения зависит, вероятно, от того, насколько подобная система сможет помочь оператору в определении расстояний. Создание подобной системы выходит за рамки данной книги, однако, может оказаться по плечу опытному и настойчивому экспериментатору.
Читать дальшеИнтервал:
Закладка:








