Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Реальные типы ШД
Шаговый двигатель в рассмотренном примере имел угол поворота 90° на шаг. Статоры и роторы реальных шаговых двигателей представляют собой последовательности мини-полюсов. Мини-полюса уменьшают угол поворота на шаги улучшают разрешение шагового двигателя. Схема шагового двигателя на рис. 10.5 представляется более сложной, однако принцип его работы идентичен рис. 10.3 и 10.4.
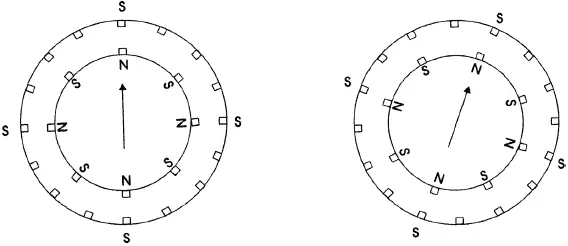
Рис. 10.5. Многополюсное управление
Ротор двигателя на рис. 10.5 поворачивается по часовой стрелке. В исходной позиции северный полюс постоянного магнита ротора притянут к южному полюсу электромагнита статора. Заметим, что таких пар магнитов, притянутых разноименными полюсами, несколько. Во втором положении цепочка электромагнитов выключается, и включается следующая по ходу часовой стрелки цепочка. Это приводит к повороту ротора по часовой стрелке на строго определенный угол. Это продолжается таким же образом и для следующих шагов. После восьми шагов цикл завершается и начинается повторение. Поворот на половинный шаг аналогичен описанному выше.
На рис. 10.6 показана схема однополярного шагового двигателя. Двигатель имеет шесть выводов, выходящих из корпуса. Как видно из рис. 10.6, обмотки соединены попарно последовательно и имеют выводы от средней точки. Если вы только что взяли в руки подобный шаговый двигатель и ничего не знаете о нем, то простейшим способом будет измерение электрического сопротивления между выводами. Составив таблицу соответствия между цветами проводов выводов и электрическими сопротивлениями между ними, вы быстро разберетесь, какие выводы соответствуют каким обмоткам. (В некоторых случаях шаговый двигатель имеет только пять выводов. В этом случае средние точки обмоток соединены между собой).

Рис. 10.6. Принципиальная схема шестиполюсного шагового двигателя
Двигатель, который мы будем использовать, имеет сопротивление 100 Ом между центральным выводом и концом обмотки, и соответственно, 220 Ом между концами обмоток. Понятно, что сопротивление между несвязанными между собой обмотками будет равно бесконечности (нет соединения). Снабженные этой информацией, мы легко сможем определить распайку выводов обмоток любого двигателя с шестью выводами. Шаговый двигатель, который мы будем использовать, имеет угол поворота 1,8° на шаг.
ИС UCN-5804
На рис. 10.7 изображена цоколевка ИС UCN-5804. ИС предназначена для управления и запитки четырехфазного однополярного шагового двигателя, который мы будем использовать в нашей конструкции. ИС UCN-5804 имеет следующие параметры:
• Максимальный выходной ток в непрерывном режиме 1,25 А
• Величина опорного напряжения 35 В
• Управление полным и половинным шагом
• Управление состоянием выхода и направлением вращения
• Встроенные защитные диоды
• Автоматический сброс при включении
• Внутренняя защита от тепловых перегрузок
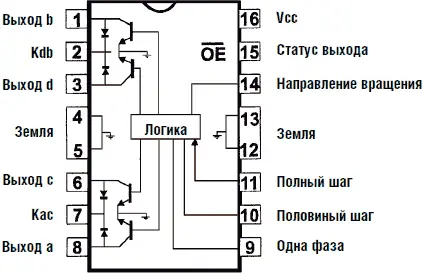
Рис. 10.7. ИС UCN-5804 контроллер шагового двигателя
ИС обеспечивает в непрерывном режиме максимальный выходной ток 1,35 А на фазу при опорном напряжении 35 В. Это оказывается более чем достаточным при управлении 12 вольтовым шаговым двигателем. Необходимый выходной ток для такого двигателя составляет (12В/110О м = 0,11 А), т. е. примерно 1/10 ампера.
Последовательность выходных импульсов, определяемая внутренней логикой UCN-5804, запускается прямоугольными импульсами, поступающими на вывод 11. Каждый прямоугольный импульс, поданный на этот вывод, своим отрицательным фронтом запускает перемещение ШД на один шаг.
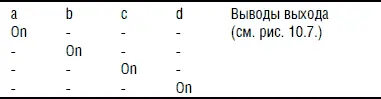
Порядок включения обмоток определяется таблицей. После того как таблица заканчивается, последовательность повторяется с начала таблицы. Для реверсирования направления вращения ШД последовательность включения обмоток определяется по таблице снизу вверх.
Вывод 15 управляет статусом выхода. Когда на этот вывод подается высокий потенциал, то все выходы ИС отключаются. Если эта функция не требуется для вашей конструкции, то необходимо соединить этот вывод с землей (низкий уровень).

Вывод 14 определяет направление вращения. Когда этот вывод имеет потенциал низкого уровня или соединен с земляной шиной, то направление вращения определяется таблицей 10.1 или 10.2, которая читается сверху вниз. Когда на этом выводе имеется высокий потенциал (15В), то направление вращения сменяется на противоположное и определяется таблицами, читаемыми снизу вверх.
Применение ИС UCN-5804
На рис. 10.8 изображена схема управления ШД с использованием ИС UCN-5804. Тактовые импульсы вырабатываются с помощью таймера ИС 555. Частота тактовых импульсов может быть увеличена или уменьшена с помощью переменного резистора V1. Изменение частоты тактовых импульсов непосредственно управляет скоростью вращения ШД. В этой главе мы также покажем, как можно управлять ШД с помощью PIC-микроконтроллера непосредственно или с использованием дополнительных схем.
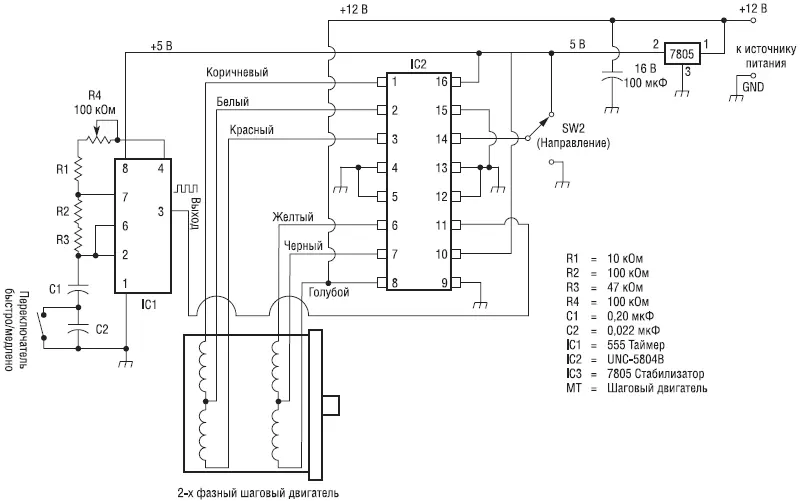
Рис. 10.8. Основная принципиальная схема управления вращением шагового двигателя
В этой схеме управление дополнительными функциями осуществляется с помощью трех выключателей. Выводы ИС, с которыми соединены эти выключатели, могут также управляться с помощью шин ввода/вывода микроконтроллера того же типа. Выключатель, соединенный с выводом 15, управляет состоянием выхода. При подаче высокого потенциала выход ИС UCN-5804 отключается и происходит остановка ШД.
Выключатель, соединенный с выводом 14, управляет направлением вращения ШД (по часовой стрелке или против часовой стрелки). Переключатель, соединенный с выводом 10 ИС UCN-5804, переключает ШД в режим полного или половинного шага. Когда на вывод 10 подан высокий потенциал, то ШД находится в режиме половинного шага. Такой режим удваивает разрешение ШД. Например, двигатель, который мы используем, имеет разрешение 1,8° на шаг. При включении режима половинного шага разрешение увеличится до 0,9° на шаг, и соответственно скорость вращения уменьшится вдвое. При подаче на вывод 10 низкого уровня ШД переключится в режим полного шага.
Читать дальшеИнтервал:
Закладка:








