Рейнгард Геттнер - Роботы сегодня и завтра

- Название:Роботы сегодня и завтра
- Автор:
- Жанр:
- Издательство:Педагогика
- Год:1988
- Город:Москва
- ISBN:5-7155-0119-9
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Рейнгард Геттнер - Роботы сегодня и завтра краткое содержание
Книга ученых ГДР посвящена актуальным направлениям совершенствования промышленного производства — роботизации и компьютеризации. Школьники узнают о том, как использование роботов и различных электронных систем способствует ускорению научно-технического прогресса, расширят свои представления о робототехнике.
Для старшеклассников.
Роботы сегодня и завтра - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Но что делать роботу во время работы токарного станка? Ему же не нужны перерывы! Чтобы увеличить производительность, перешли к обслуживанию нескольких станков одним роботом: пока на одном станке обрабатывается деталь, робот загружает другой станок, затем он извлекает готовую деталь из первого станка и направляет ее в магазин. Процесс повторяется в запланированной и точно рассчитанной последовательности. Для бесперебойной работы необходима своевременная замена поддонов с заготовками и готовыми деталями. Эта операция по возможности должна выполняться также самим роботом: опыт показывает, что необходимые движения, если они выполняются периферийными устройствами, ограничивают мобильность робота и увеличивают расходы.
Обслуживаемая одним роботом группа машин (1), токарный центр (2), шлифовальный станок (3), сверлильный станок (4), транспортер (5) (по Холмесу).
Промышленные роботы, предназначенные для загрузки или обслуживания технических устройств, имеют весьма широкий диапазон применения. Кроме названных случаев они используются для обслуживания разнообразных прессов, плавильных печей, станков и прочих обрабатывающих или перерабатывающих машин, транспортирующих устройств, транспортных средств, магазинов, упаковочных установок и т. п.
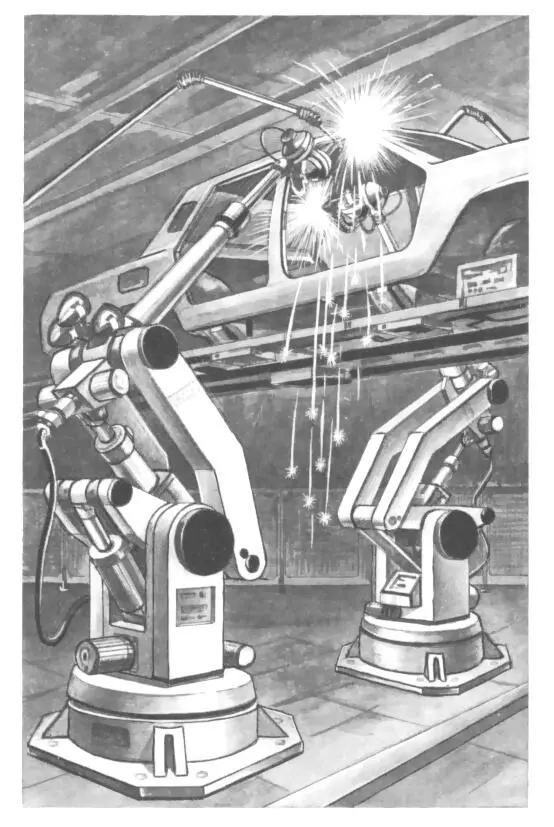
Сварка — точечная или дуговая — трудоемкий и сложный технологический процесс. О значении сварочных работ свидетельствуют такие примеры: судно водоизмещением 10 тыс. тонн насчитывает 150 км сварных швов, а для соединения 600 прессованных или штампованных деталей металлического кузова автомашины необходимо 6 тыс. точечных сварок и 20 м швов с дуговой сваркой. В настоящее время сварочные автоматы в состоянии выполнять относительно длинные швы. Что касается многочисленных коротких угловых и стыковых швов, то они еще варятся вручную, хотя наиболее пригодны для этих целей роботы — короткие швы при ручном исполнении зачастую требуют больше времени на переоснастку, чем на саму сварку.
Эффективность сварочного робота зависит в первую очередь от правильности его технологического использования. Если сейчас их в основном приспосабливают к уже имеющимся технологическим цепочкам, то в будущем появятся новые конструкции сварочных роботов. Они будут устанавливаться по нескольку единиц на производственных линиях или производственных участках. При технологической подготовке производственного процесса инженеры по сварке определяют, какой из видов сварочных работ наиболее приемлем в данном случае, и выбирают оптимальные формы соединения. Принятие специалистами по сварке соответствующих решений облегчается специально разработанными программами.
Центральный институт по сварочной технике ГДР в г. Галле разработал в рамках гибкой системы отдельные блоки, из которых можно скомпоновать различные сварочные роботы.
От сварочных роботов требуется высокая точность, маневренность и скорость. Они должны самостоятельно перемещать сварочную горелку, сварочные клещи и свариваемые детали. В большинстве случаев для этого достаточна шестая степень свободы маневрирования. В зависимости от выполняемой задачи сварочный робот может развивать скорость от 300 до 500 мм/с. Несущая способность робота определяется типом сварочной горелки и обрабатываемой детали.
Сварочная горелка с сенсорами.
Тот, кто бывал в кузнице, наверняка восхищался видом раскаленной стали, уверенными движениями кузнецов, орудующих своими молотами, видом шипящих паром готовых поковок. Но внимательный наблюдатель отметил бы и трудности этой работы, требующей большой мускульной силы, отметил бы адский грохот и изнуряющую жару. Замена в этом процессе кузнеца роботом, как видим, весьма желательна.
Итак, в индукционной печи деталь нагревается до рабочей температуры 1000–1200 °C. После этого робот извлекает ее из печи и переносит в поковочную форму, где осуществляется первичное прессование. Затем робот вновь захватывает деталь и помещает ее в следующую поковочную форму. Процесс повторяется до тех пор, пока не закончится формование. После процесса ковки другой робот направляет деталь на закаливание. Полностью готовая деталь транспортируется роботом в контейнер.
Система монтажных роботов, состоящая из основного робота (1) и вспомогательного робота (2), 3 — подача заготовки, X, Y — направления движений.
Удаление грата (излишков металла) с изделий из таких материалов, как чугун, алюминий, пластмасса и т. п., — трудоемкая, физически тяжелая и грязная операция. Для этих целей также применяются роботы, оснащенные вращающимися или скользящими напильниками и шлифовальными элементами. Они получают детали для обработки непосредственно после завершения процесса отливки.
Роботы можно использовать во всех отраслях промышленности, в том числе и в легкой, где отдельные предметы одежды часто изготовляются вручную. Наверное, доля ручного труда в изготовлении определенных индивидуальных модных предметов одежды даже спустя десятилетия будет оставаться еще относительно высокой, и по-прежнему ручная работа будет цениться гораздо дороже. Но подчас в таком труде нет никакой необходимости. Напротив, чем рациональнее организовано производство пошива, тем выгоднее оно для народного хозяйства и для покупателя. Поэтому очень важно внедрение швейных роботов в производство готового платья, где до сих пор около 75 % всего основного времени приходится на ручной труд, выполняемый преимущественно женщинами. Это значительно облегчит труд швей.
На отдельных промышленных предприятиях для экономии рабочего времени и для облегчения труда используются не только промышленные роботы, но и управляемые вручную манипуляторы. Это манипуляторы с дистанционным управлением для работы с ядовитыми и другими вредными для здоровья веществами или так называемые балансеры, подъемные механизмы, такие, как управляемые непосредственно человеком синхронные манипуляторы для перемещения тяжестей в пределах рабочего помещения при компенсации грузов. Они используются в кузнечных и литейных цехах для выполнения тяжелых погрузочно-разгрузочных работ, в медицине для поднятия и транспортировки носилок с пациентами.
Читать дальшеИнтервал:
Закладка: