Рейнгард Геттнер - Роботы сегодня и завтра

- Название:Роботы сегодня и завтра
- Автор:
- Жанр:
- Издательство:Педагогика
- Год:1988
- Город:Москва
- ISBN:5-7155-0119-9
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Рейнгард Геттнер - Роботы сегодня и завтра краткое содержание
Книга ученых ГДР посвящена актуальным направлениям совершенствования промышленного производства — роботизации и компьютеризации. Школьники узнают о том, как использование роботов и различных электронных систем способствует ускорению научно-технического прогресса, расширят свои представления о робототехнике.
Для старшеклассников.
Роботы сегодня и завтра - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Применяются роботы также и в научно-исследовательской работе. Если эффективность научных исследований в настоящее время в решающей степени определяется высокопроизводительным автоматизированным лабораторным оборудованием и приборами, то напрашивается ряд вопросов: не подкрепляется ли разработка и выпуск такого автоматизированного лабораторного оборудования как раз промышленной робототехникой? Нельзя ли с помощью роботов осуществлять время от времени эксплуатацию в три смены высокопроизводительных научно-исследовательских установок без обслуживающего персонала? Конечно же это возможно!
Другой пример: ученые занимаются всерьез так называемым роботом-поводырем. Это нечто вроде тележки с ходовым механизмом, имеющим привод и работающим от постоянного тока. На нем смонтированы сенсоры и микроЭВМ. С помощью этих технических устройств пространство около робота «ощупывается» ультразвуком и воздействием света. Робот может быть запрограммирован по методу запоминания пути, который предстоит пройти. Робот может затем по ряду характерных признаков вновь найти этот маршрут. Однако же для таких роботов название «промышленный робот» не совсем справедливо.
Во многих отраслях промышленности доля рабочего времени, требующегося для монтажа, сравнительно велика. Например, в машиностроении и автомобильной промышленности ГДР она составляет 33 %, а в электротехнике (электронике) — свыше 40 % общего рабочего времени. Из них опять же около 60 % приходится на операции, выполняемые вручную, около 30 % монтажных работ механизированы; около 10 % частично автоматизированы; 2–3 % полностью автоматизированы. По международным подсчетам, ручной труд приблизительно 70 % всех занятых на монтаже рабочих можно заменить или существенно сократить за счет использования промышленных роботов. Это увеличит производительность труда примерно на 30 %. Высвободится и рабочая сила.
Однако до сих пор в сфере монтажа промышленные роботы не нашли еще широкого применения, поскольку сборка является трудной для механизации и автоматизации областью. Здесь предъявляются очень высокие требования к умению обращаться с техникой. Зачастую применение роботов оканчивалось неудачей из-за отсутствия эффективных научно-исследовательских решений, ненадежности узлов монтажных роботов, а также неспособности «робота-монтажника» реагировать на неполадки. Таким образом, указанная выше в процентном отношении относительно невысокая доля механизированного монтажа не вызывает удивления.
Во всех развитых в промышленном отношении странах проводится интенсивная работа по решению этих задач. После того как в значительном объеме решены проблемы сенсорной техники, включая соединение различных видов сенсорной информации, распознавание деталей, а также уменьшено количество нарушений в технологическом процессе, на отдельных предприятиях были осуществлены эксперименты, в ходе которых оправдали себя различные образцы, началось последовательное внедрение промышленных роботов с сенсорным управлением для автоматизированного монтажа.
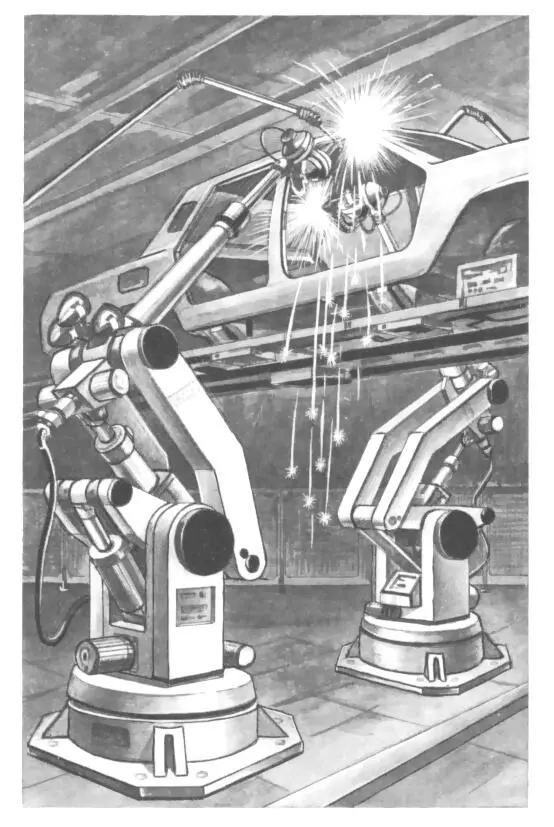
Грейферы монтажных роботов снабжены сенсорами, которые позволяют им распознавать, захватывать и монтировать соответствующие предметы. Например, монтажный робот, оснащенный адаптивной (способной приспосабливаться) грейферной головкой, вводит болт в отверстие. Различные образцы искомых предметов дают этому промышленному роботу возможность найти отверстия для данного болта. Вместо тактильных сенсоров для механической компенсации отклонений от положения применяются вспомогательные монтажные приспособления.
Принцип управляемой монтажной системы. 1 — акустический предохранительный сенсор, 2 — предохранительный сенсор (проводное включение), 3 — сенсор положения, скорости и ускорения, 4 — искатель в ультразвуковом диапазоне, 5 — участок тактильного сенсора, 6 — силовой сенсор, 7 — датчик контроля усилия зажима, 8 — оптический датчик (телекамера).
Имеются также роботы с двумя-тремя руками, действующими одновременно. На этих руках расположены различного рода грейферы с тактильными или другими сенсорами. Такой робот может одной рукой захватывать деталь монтажа и помещать ее в контрольное приспособление; другая рука извлекает ее оттуда и откладывает с одновременной сортировкой по размерам и качеству, в то время как первая рука уже вводит в контрольное устройство новую деталь. Детали для будущего монтажа и соединительные элементы должны быть выполнены таким образом, чтобы роботы могли с ними «работать». Самые простые и, очевидно, самые оптимальные решения здесь — штабельные конструкции, при которых все монтажные детали монтируются в одном направлении. Однако потребуется и создание стандартных узлов и соединительных элементов, которые отвечают условиям автоматизированного монтажа с помощью промышленных роботов.
Правильное реагирование монтажных роботов на помехи также предъявляет очень высокие требования к их создателям. Помехи многообразны и многочисленны. Они начинаются при контроле на наличие всех монтируемых деталей, продолжаются в виде различных возможных помех при позиционировании деталей, а также на других участках процесса монтажа и не исключены при заключительном контроле качества смонтированных роботами узлов. Уже на относительно простых процессах монтажа при управлении роботами необходимо принимать более ста различных решений.
В рамках научных исследований определяются все новые и новые пути, для того чтобы монтажные роботы с помощью своих сенсоров и микросчетчиков могли правильно реагировать на различные помехи, не прерывая при этом процесс монтажа.
В связи с монтажом зачастую необходима сортировка деталей различных размеров по их величине, форме, цвету, массе и по другим признакам. Робот-сортировщик, снабженный оптическим сенсором, может выполнять эту задачу.
Гибкая система сборочных роботов с двумя руками и оптическими сенсорами.
В бункере находятся несортированные детали. Сначала они должны пройти через отсекающую станцию, поскольку оптический сенсор в состоянии зафиксировать лишь отдельно лежащие детали. Затем детали попадают на конвейер и для лучшего распознавания освещаются. Определенные признаки, такие, как величина и форма, распознаются с помощью сенсора приблизительно за 500 мс. Фотоматрица с самозондированием (смонтированные в виде растров светочувствительные элементы) преобразовывает оптическую информацию в виде изображения в соответствующие электрические сигналы. На основе информации сенсора через управление робота с одной грейферной рукой можно соответствующим образом располагать детали и в упорядоченном виде подавать их к накопителю или на дальнейшую обработку.
Читать дальшеИнтервал:
Закладка: