Вадим Мацкевич - Занимательная анатомия роботов

- Название:Занимательная анатомия роботов
- Автор:
- Жанр:
- Издательство:Радио и связь
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Вадим Мацкевич - Занимательная анатомия роботов краткое содержание
В занимательной форме рассказано об исследованиях и разработках важнейших систем современных роботов. Показано, как можно самим выполнить ту или иную систему робота из простейших электронных схем. Приведены практические схемы отечественных и зарубежных любительских конструкций роботов. По сравнению с первым изданием (1980 г) материал значительно обновлён Для широкого круга читателей.
Занимательная анатомия роботов - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Таким образом, схват – его рабочие и нерабочие поверхности – снабжён подобием осязания и очувствлен по силе сжатия. Кроме того, на передних поверхностях пальцев между датчиками осязания помещено по глазу – фотодиоду, реагирующему на затенение: когда рука приближается к какому – либо объекту, но ещё не коснулась его, в машину поступает сигнал о приближении и о необходимости снизить скорость перемещения. ЭЦВМ принимает, обрабатывает и использует принятую информацию при реализации заданной программы.
Манипулятор Эрнста работает как робот с «завязанными глазами». Датчики, которыми он оснащён, собирают информацию вслепую – осязанием, «на ощупь». Он не может отделить процесс сбора информации от процесса движения, сначала получить представление о ситуации, сложившейся во внешнем мире, и только затем начать действовать. Именно поэтому он вынужден искать их один за другим. А настоящий робот должен иметь такие органы чувств, которые дали бы ему возможность предпослать движению сбор информации.
Конструирование сенсорных устройств
Как мы уже говорили, неотъемлемой частью систем осязания роботов являются сенсорные устройства, вызывающие срабатывание механизмов ориентации и захвата предметов. Контактное управление все чаще находит сейчас применение в разных областях. В обыденной жизни можно встретиться с этим способом управления в лифте. В современных лифтах вместо обычных кнопок устанавливаются на панели сенсорные контакты – неподвижные металлические пластины, при прикосновении к которым приходит в действие механизм лифта.
Что это за система управления, как она работает и каковы её преимущества? Сенсорное управление имеет одно преимущество – в нём нет электрических контактов – одного из самых ненадёжных звеньев электронной аппаратуры. Именно благодаря этому бесконтактное управление нашло широкое распространение. В частности, сенсорными переключателями каналов оснащены многие современные телевизоры.
Как работает система сенсорного управления? Различают два способа воздействия: ёмкостное и резистивное.
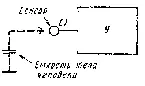
Тело человека имеет определённую довольно большую ёмкость (рис. 57) относительно окружающих проводящих предметов. Поэтому, когда человек прикасается к металлической пластине – сенсорному контакту (или короче – сенсору), резко изменяется ёмкость, приведённая к входу аппарата. На этом основана работа ёмкостного сенсора.
В резистивном сенсоре использовано сопротивление покрова пальца (рис. 58). В этом случае сенсор состоит из двух изолированных металлических пластин, которые замыкают пальцем при прикосновении.
Самая простая система сенсорного управления подобного рода может выглядеть так, как представлено на рис. 59. В исходном состоянии, т. е. тогда, когда мы не касаемся сенсора Е1 пальцем, через транзистор VT1 течёт очень слабый ток, поэтому напряжение на его коллекторе равно напряжению питания (на резисторе R1 почти нет падения напряжения). Прикосновение пальца к обеим частям сенсора равнозначно включению резистора между источником питания и базой транзистора. Таким образом, появляется базовый ток, что вызовет увеличение тока через цепь коллектора и включённый там резистор. При этом напряжение на коллекторе немедленно уменьшится – на выходе сформируется так называемый перепад напряжения. Если убрать палец с сенсора, напряжение на выходе восстановится. Таким простым способом – прикосновением пальца к сенсору – мы вызываем образование импульсов напряжения на выходе устройства.
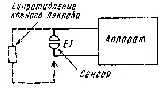
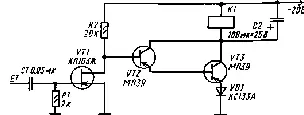
Зная, как образуются управляющие электрические импульсы, можно сравнительно просто собирать различные устройства, выполняющие те или иные задачи. Так на рис. 60, а представлена структурная схема узла управления освещением. Мы видим здесь три основных составных элемента: сенсор Е1, усилитель сигнала, электронный переключатель – триггер, усилитель постоянного тока и его нагрузка – её роль играет лампа накаливания HL1. Принципиальная схема устройства показана на рис. 60,6. Электрические импульсы с выхода усилителя на транзисторе VT1 переключают триггер, собранный на транзисторах VT2, VT3. Триггер переходит из одного устойчивого состояния в другое, когда открыт то один из его транзисторов, то другой.
Когда открыт транзистор VT3, то закрыт транзистор VT4 усилителя тока и лампа не горит. Она загорается при закрывании транзистора. В устройстве использована лампа на напряжение 6 В и ток 0,1 А.
В устройстве можно применить любые германиевые транзисторы малой мощности. Германиевые диоды – тоже любые. Важно лишь, чтобы в триггере были однотипные транзисторы и однотипные диоды. Источник питания – две батареи 3336, соединённые последовательно.

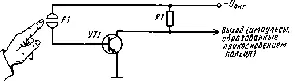
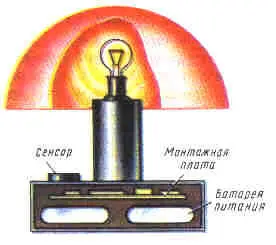
После того как устройство будет смакетировано и проверено, его можно установить в корпус настольной лампы. На рис. 61 показано примерное размещение отдельных узлов и деталей в корпусе лампы. Сенсорный выключатель. Этим устройством можно заменить выключатели электроосветительных приборов, телевизора, радиоприёмника. Многие уже, наверное, сталкивались с таким явлением: если прикоснуться пальцем к тока. Вот этим, казалось бы, вредным эффектом можно воспользоваться, собрав сенсорное устройство, схема которого приведена на рис. 62. Если прикоснёмся пальцем к сенсорному контакту Е1, через конденсатор С1 к затвору полевого транзистора VT1 (в исходном состоянии он открыт) будет приложено небольшое переменное напряжение. Ступень на транзисторе VT1 представляет собой усилитель – ограничитель.
Усилитель постоянного тока на транзисторах VT2 и VT3 необходим для усиления сигнала по мощности до уровня, достаточного для срабатывания реле К1. Контакты этого реле коммутируют исполнительные цепи. Конденсатор С2, которым зашунтировано реле, сглаживает пульсации, напряжения на обмотке. Стабилитрон в цепи эмиттера выходного транзистора обеспечивает помехоустойчивость устройства.
Читать дальшеИнтервал:
Закладка: