Вадим Мацкевич - Занимательная анатомия роботов

- Название:Занимательная анатомия роботов
- Автор:
- Жанр:
- Издательство:Радио и связь
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Вадим Мацкевич - Занимательная анатомия роботов краткое содержание
В занимательной форме рассказано об исследованиях и разработках важнейших систем современных роботов. Показано, как можно самим выполнить ту или иную систему робота из простейших электронных схем. Приведены практические схемы отечественных и зарубежных любительских конструкций роботов. По сравнению с первым изданием (1980 г) материал значительно обновлён Для широкого круга читателей.
Занимательная анатомия роботов - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Редуктор – самодельный, изготовлен из шестерён от старых игрушек. Ведомая шестерня 32 редуктора сцеплена с электродвигателем шестернёй диаметром 7 мм, насаженной на его вал. Боковые стенки редуктора изготовлены из листовой стали толщиной 1 мм. Их крепят тремя винтами М2,5. На винты между пластинами надевают металлические втулки с наружным диаметром 4,5 мм и длиной 15 мм. Кривошипы, надеваемые на валы, сделаны из латуни (или из дюралюминия).
Батарею 3336, питающую электродвигатель, крепят на шасси двумя скобами 20 (см. рис. 82), а монтажные платы 16, 18 дешифратора – на пластмассовых стойках 17 и 19. В игрушке используется электродвигатель ДИ1 – 3 14МО 390 001 ТУ. По сравнению с другими аналогичными двигателями он обладает повышенной мощностью, высоким КПД, низким уровнем акустических шумов и радиопомех.
Пищалка 10 сделана из плотного картона и оклеена калькой. Внутри закреплена распорная пружина из стальной проволоки диаметром 0,5 мм. Звук издаёт металлическая пластина толщиной около 0,08 мм, вибрирующая под действием струи воздуха, входящего в полость пищалки. Крепят её к стойке 11, припаянной к нижней части головы. Голова 9 и кожух – из папье-маше (обрезки хлопчатобумажной ткани, пропитанные казеиновым клеем).
Электромеханическая часть игрушки сложна в изготовлении. Но трудности её изготовления компенсируются радостью, которую вы получите от общения с этой весёлой игрушкой.
Человекоподобные роботы
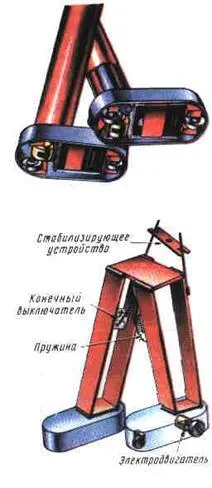
Модель простейшего человекоподобного робота с программным управлением показана на рис. 84. Высота робота около 70 см, и, хотя вид у него внушительный, он сделан из тонкого картона, покрыт металлизированной бумагой и окрашен серебристо – голубой краской. В ступнях робота размещены батареи и электродвигатели, перемещающие робота на обрезиненных колёсах. Как сконструировать ноги робота, чтобы он шагал, поясняет рис. 85.
При конструировании больших роботов трудно сделать модель устойчивой. Поясним отдельные конструктивные решения в таком роботе на примере модели, сделанной юными техниками из г. Щёлково.
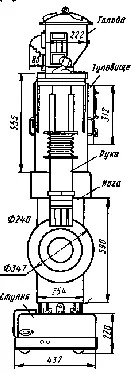
На рис. 86 дан чертёж этого робота в профиль и указаны основные размеры конструкции. Ступни робота сделаны очень большими, чтобы увеличить устойчивость модели. Ноги робота с верхней горизонтальной платформой свободно отделяются от туловища. В массивных ступнях модели находятся батареи аккумуляторов и механизмы, приводящие в движение задние колеса каждой ступни. Всего в каждой ступне смонтировано по три металлических колеса с жёсткими резиновыми обоймами. В средней части ноги проходят металлические тяги, благодаря которым достигается устойчивость модели во время движения. Свободное пространство в ногах заполнено различными блоками электронного оборудования модели, доступ к которым возможен через люки под коленными дисками робота. Туловище робота устанавливают на горизонтальную платформу и крепят замками. На платформе смонтированы реле и электромеханические автоматы, управляющие электродвигателями движения ног. При ходьбе ноги робота шагают, не отрываясь от пола (катятся). Такая конструкция ног позволяет роботу не только устойчиво ходить, но даже «плясать» под музыку.

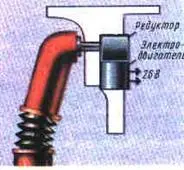
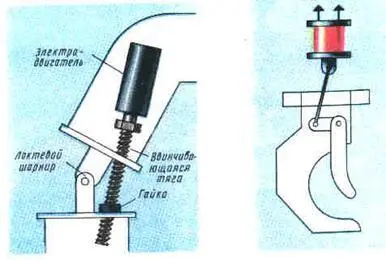
Как работает механизм подъёма рук робота, поясняет рис. 87. На рис. 88 показана конструкция локтевого сустава модели. Когда робот берет в руку предметы, он прижимает их большим пальцем руки, поворачивающимся с помощью электромагнита (рис. 89)
Голову робота поворачивают также электродвигатель с редуктором. Всюду в модели установлены конечные выключатели, определяющие пределы перемещения ног, рук и головы.
Конструирование роботов – манипуляторов
Многие наши школьники уже самостоятельно конструируют промышленных роботов – разумеется, в кружках под руководством специалистов. Так, школьники из Подмосковья (г. Электросталь) не так давно изготовили механическую руку (рис. 90). Рука робота укреплена на самодвижущейся тележке. Управляют рукой и тележкой с пульта дистанционно. Устройство предназначено для работы в токсичной среде.

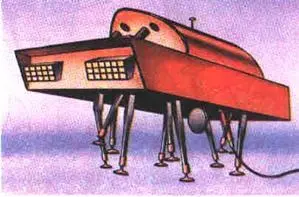
Ребятами созданы многочисленные модели стопоходящих роботов, оснащённых манипуляторами. На рис. 91 показана действующая модель космического шагохода «Марс-1», разработанного учащимися Одессы.
Если вы займётесь конструированием моделей манипуляторов, то вам помогут некоторые типовые конструкторские решения индустриальной робототехники, с которыми мы сейчас познакомимся.
Системы привода современных манипуляторов. Современные системы привода промышленных манипуляторов примерно в 20% случаев пневматические, в 50% – гидравлические и в 30% – электрические. Гидравлический привод целесообразен в манипуляторах, оперирующих большими массами, пневматический, как более скоростной, – в схватывающих устройствах. Электрический привод удобнее использовать в обучающихся роботах, выполняющих различные рабочие операции (рис. 92). Он, как правило, состоит из тиристорного или транзисторного устройства питания
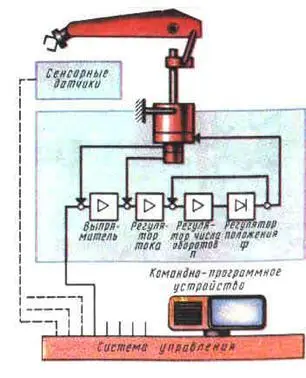

‹-› Устройство поступательного движения ‹поворотное устройство
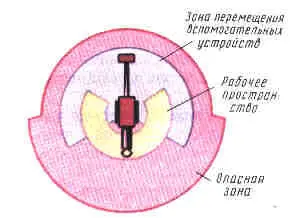
Рабочие зоны манипулятора и зоны опасности. Зоны действия манипулятора (рис. 93) – это рабочее пространство, зона перемещения вспомогательных устройств манипулятора (его направляющих, противовесов и т.д.) и зона опасности. При налаживании манипулятора определяют его запрограммированное рабочее пространство, размеры которого меняются от задачи к задаче.
Читать дальшеИнтервал:
Закладка: