Вадим Мацкевич - Занимательная анатомия роботов

- Название:Занимательная анатомия роботов
- Автор:
- Жанр:
- Издательство:Радио и связь
- Год:1998
- Город:Москва
- ISBN:5-256-00037-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Вадим Мацкевич - Занимательная анатомия роботов краткое содержание
В занимательной форме рассказано об исследованиях и разработках важнейших систем современных роботов. Показано, как можно самим выполнить ту или иную систему робота из простейших электронных схем. Приведены практические схемы отечественных и зарубежных любительских конструкций роботов. По сравнению с первым изданием (1980 г) материал значительно обновлён Для широкого круга читателей.
Занимательная анатомия роботов - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Вот как это произойдёт. Нажмите на кнопку SB1 и выводом базы транзистора дотроньтесь до фольги – отрицательного полюса элемента G1 – лампа зажжётся. Таким образом, с помощью транзистора даже слабому элементу удалось зажечь лампу.
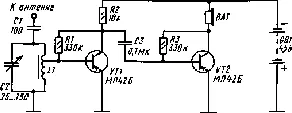
И в заключение – простейший радиоприёмник. Для сборки радиоприёмника (рис. 13) понадобится колебательный контур – конденсатор С2 и катушка L1. Каркас катушки склеивают из бумаги на отрезке круглого стержня длиной 40…45 мм и диаметром 8 мм из феррита 400НН или 600НН. Чтобы приёмник мог принимать радиостанции средневолнового диапазона, намотайте на каркас 80 витков эмалированного провода диаметром 0,15…0,18 мм.
Моделирование робото-технических радиоэлектронных устройств из модулей
Типовые модули являются основой всех промышленных радиоэлектронных разработок. В этом отношении наиболее убедителен пример конструирования современных ЭВМ. Первые ламповые ЭВМ состояли из множества типовых модулей. Транзисторные ЭВМ или, как их называют, ЭВМ второго поколения (серия «Минск» и др.) также собраны из транзисторных модулей. Для удобства конструирования ЭВМ второго поколения было разработано несколько серий типовых радиоэлектронных модулей.
Вывод: нужно осваивать модульное конструирование! Это современно, экономично и удобно.
Модульный конструктор. Радиокубики помогли нам понять назначение и свойства различных радиодеталей и транзисторов. Из кубиков можно собирать отдельные простые действующие устройства: мультивибраторы, ждущие мультивибраторы, триггеры и т.п. Но это только кирпичики более сложных радиоэлектронных устройств различного назначения.
Так же как многоэтажный современный дом собирают из отдельных простых элементов, так и самые сложные электронные аппараты, и робототехнические устройства в том числе, собирают из отдельных модулей – мультивибраторов, триггеров и т. п. Именно из таких модулей создавали ЭВМ, а мы из них будем собирать различные занимательные конструкции. Модули помогут нам моделировать робототехнические системы речи, слуха, зрения.
Промышленность выпускает модульный конструктор (рис. 14), состоящий из нескольких модулей. В первую очередь нам потребуются: модуль А – логический элемент ЗИ – НЕ с открытым выходом; модуль Б – маломощный логический элемент ЗИ – НЕ; модуль В – триггер, составленный из двух элементов И – НЕ; модуль Г – ждущий мультивибратор; модуль Е1 – мультивибратор; модуль Е2 – управляемый мультивибратор.
Используя модульные блоки, можно собирать модели различных устройств со звуковым выходным сигналом, которые можно будет использовать в различных робототехнических устройствах.
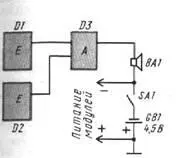
Одно из простейших устройств такого рода – генератор звуковой частоты (рис. 15). Из схемы видно, что на входы модуля D3 поданы сигналы с двух мультивибраторов D1 и D2. Один из них, D1, вырабатывает сигнал с частотой около 2000 Гц, второй, работающий с частотой около одного герца, периодически прерывает звуковой сигнал.

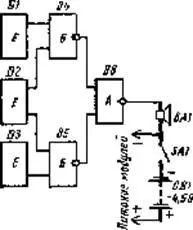
Если дополнить этот генератор ещё одним мультивибратором (рис. 16), то можно получить сигнальное устройство, звуковые импульсы которого будут прерывистыми. Модули этого устройства такие же, как и в предыдущем, только у мультивибратора D3 конденсаторы Cl, C2 имеют ёмкость по 2 мкФ.
Такой гудок может выполнять функции сторожевого устройства. Для этого надо отключить модуль D2, а освободившийся вход модуля D4 через пару замкнутых сторожевых контактов или тонкую сторожевую проволоку соединить с плюсовым выводом батареи GB1. При размыкании контактов или при обрыве проволоки раздастся прерывистый – тревожный сигнал. По схеме рис. 17 можно собрать гудок, тон которого будет периодически меняться.
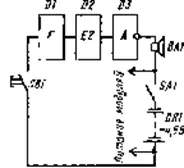
В тех случаях, когда необходимо ограничить время звучания гудка, устройство можно построить по схеме рис. 18. При нажатии на кнопку SB1 подаётся запускающий перепад напряжения на вход ждущего мультивибратора D1. На его входе появляется высокий логический уровень напряжения, и начинает работать управляемый мультивибратор D2. Его сигнал через логический элемент D3 поступает на динамическую головку ВА1.
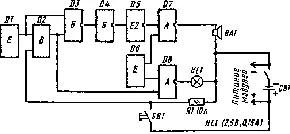
Примером устройства, использующего одновременно и звуковую, и световую сигнализацию, может служить контрольное устройство для дежурного робота (рис. 19). Рассмотрим работу этого устройства. Задающий мультивибратор D1 периодически переключает триггер D2 в состояние, при котором на его выходе присутствует высокий уровень напряжения. Этот уровень приложен к входу логического элемента D8, нагруженного сигнальной лампой HL1. Выходной сигнал мультивибратора D6 прерывает свечение лампы, делая световой сигнал более заметным.
С выхода триггера D2 сигнал поступает также на элемент совпадения D3. Сигнал с выхода инвертора D4 включает управляемый генератор D5. Выходной сигнал этого генератора через элемент D7 подан на динамическую головку ВА1. Поскольку на второй вход элемента D7 подан также сигнал с мультивибратора, звуковой сигнал будет прерывистым.
Моделирование радиоэлектронных робототехнических устройств на микросхемах. Самыми совершенными радиоэлектронными модулями являются интегральные микросхемы, содержащие в небольшом объёме очень большое число радиодеталей. На рис. 20 показан кристалл микросхемы рядом с муравьём. Не правда ли, впечатляющее сравнение?
Читать дальшеИнтервал:
Закладка: