Вертолёт, 2005 № 03

- Название:Вертолёт, 2005 № 03
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2005
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Вертолёт, 2005 № 03 краткое содержание
Вертолёт, 2005 № 03 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
В первую очередь необходимо было проверить влияние частоты вращения несущего винта на вертикальную скорость снижения и определить сочетания общего шага и частоты вращения, обеспечивающие устойчивую авторотацию с меньшими значениями вертикальных скоростей.
Зависимость вертикальной скорости снижения на режиме авторотации от скорости вращения несущего винта представлена на рис. 1. Видно, что изменение скорости вращения с 92 % до 84 % дает уменьшение вертикальной скорости снижения более чем на 3 м/с при скорости планирования 130 км/ч, что уменьшает кинетическую энергию вертолета более чем на 25 %. На скорости 160 км/ч кинетическая энергия вертолета уменьшается примерно на 15 %.
Для определения величины раскрутки несущего винта и уменьшения вертикальной скорости при торможении на высоте 1000 м были выполнены режимы с уменьшением поступательной скорости со 130 км/ч (для полетной массы 37 т) и 150 км/ч (для полетной массы 49 т) до скорости 100 км/ч.
Как показали испытания, на режимах торможения увеличение оборотов несущего винта незначительно: при минимальном общем шаге и при изменении угла тангажа на кабрирование на 10° оно составляет только 1,2–3%. Вертикальная скорость уменьшается на 2,5-З м/с (меньшие значения относятся к полетной массе 37 т).
В связи с тем, что планирование на режиме авторотации для полетных масс более 48 т происходит при значениях общего шага больше минимального, изменение угла тангажа на кабрирование на 10° с одновременным уменьшением общего шага несущего винта до минимального дает больший прирост частоты вращения несущего винта (2,5–5,5 %), что увеличивает его кинетическую энергию почти на 15 %. Значительный темп уменьшения частоты вращения несущего винта в процессе «подрыва» общего шага несущего винта при малых полетных массах вертолета приводит, как это отмечалось ранее, к заметному изменению эффективности управления.
Поэтому для Ми-26 стандартная техника пилотирования при «подрыве» не могла быть рекомендована: летчик привычными, но недостаточными по величине и темпу отклонениями продольного управления (что вполне вероятно) мог выполнить посадку с вращением на кабрирование и, следовательно, с большим, чем допускается для посадки, тангажом.
В этом случае за счет вращения происходит дополнительное нагружение элементов конструкции шасси и хвостовой балки. Исходя из этих соображений посадочный угол тангажа вертолета должен быть зафиксирован перед увеличением общего шага, когда еще сохраняется обычная эффективность управления, а в процессе «подрыва» необходимо только удерживать вертолет в заданном положении, что не требует больших отклонений продольного управления.
При определенных значениях полетных масс частота вращения несущего винта приближается к 66 %, то есть к ограничению по этому параметру, а в процессе «подрыва» происходит ее уменьшение ниже допустимой величины. Эту особенность необходимо учесть при выполнении посадок на авторотации.
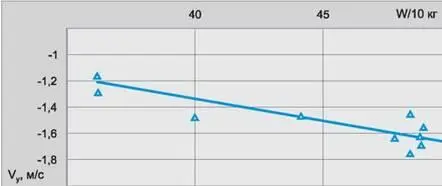
Рис. 2. Зависимость вертикальной скорости приземления при выполнении посадки на авторотации вертолета Ми-26 от полетной массы
Для следования требованиям норм прочности и создания безопасных зазоров между лопастями и хвостовой балкой уменьшение общего шага НВ после посадки должно быть таким, чтобы обеспечить его минимальное значение (1°) только при частотах вращения несущего винта, заведомо меньших 50 %. Минимальное значение общего шага несущего винта должно быть достигнуто только после срабатывания центробежных ограничителей свеса, когда угол взмаха лопасти вниз ограничивается величиной -2° (минимальный угол взмаха лопастей вниз до срабатывания центробежных ограничителей свеса составляет -6°).
Выполнению посадок с выключенными двигателями на вертолете Ми-26 предшествовала серия полетов на вертолетах Ми-8 и Ми-6 для проверки выбранной методики посадки. Сравнение результатов математического моделирования посадок на режиме авторотации этих вертолетов показало, что наиболее близким аналогом вертолета Ми-26 по динамике посадки является вертолет Ми-8 с максимальной полетной массой 12 т, но при меньших скоростях планирования, обеспечивающих равенство вертикальных скоростей захода на посадку и приземления.
Целесообразность отработки новой техники посадок на Ми-6 полетной массой 40,5 т обосновывалась его близкими к Ми-26 характеристиками массы и габаритами, а также возможностью проведения подобия по удельной энергии, что было важно для начального периода испытаний, предусматривавшего посадки с полетными массами 36 и 40 т.
Однако выяснилось, что Ми-6 по динамике посадки, темпу увеличения общего шага при «подрыве» и другим параметрам в качестве аналога для вертолета Ми-26 не подходит. Поэтому на Ми-6 было выполнено только две посадки вместо шести запланированных. Процесс выполнения посадки, то есть время от начала маневра до приземления, у этого вертолета занимает около 17,5 секунд.
Таким образом, результаты моделирования и летных испытаний с учетом особенностей Ми-26 позволили выработать следующие рекомендации выполнения посадок:
— планирование при малых полетных массах и минимальном общем шаге на режиме установившейся авторотации выполняется на скорости 130–150 км/ч, при полетных массах 48 т и более при значениях общего шага 2–3°, обеспечивающих поддержание частоты вращения несущего винта 86–88 %;
— увеличение угла тангажа для гашения поступательной скорости начинать на высоте 50–40 м. При планировании и значениях общего шага больше 1° одновременно с увеличением угла тангажа общий шаг уменьшается до минимального;
— угол тангажа увеличивается не более чем на 10–12° от балансировочного значения на предпосадочном планировании;
— посадочный угол тангажа 10° необходимо создавать перед «подрывом» общего шага;
— «подрыв» общего шага несущего винта выполнять на высоте 18–15 метров с темпом 6-10 °/с;
— после приземления общий шаг уменьшать с таким расчетом, чтобы он достигал минимального значения при частоте вращения 50 % и менее.
После выполнения предусмотренных программой испытаний посадок на вертолетах Ми-6 и Ми-8 на режиме авторотации были выполнены посадки по-самолетному на вертолете Ми-26 с вертикальной скоростью приземления около 1,5 м/с и нормальной полетной массой (вертикальная скорость на предпосадочном планировании около 7–8 м/с).
Для выполнения первой посадки с полетной массой 36 т регулировка несущего винта была выполнена так, чтобы при минимальном общем шаге несущего винта обеспечить его обороты 86 % от номинальных на режиме установившейся авторотации.
Читать дальшеИнтервал:
Закладка: