Юрий Почанин - Робототехника в промышленности

- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2022
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Юрий Почанин - Робототехника в промышленности краткое содержание
Робототехника в промышленности - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
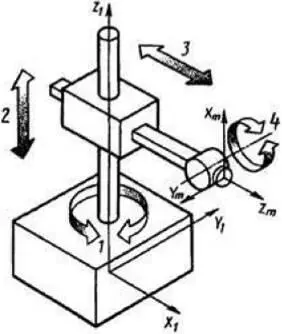
Рис. 1.2. Схема робота с цилиндрической системой координат
Удобство конструкции и программирования способствовало более широкому распространению таких манипуляторов с полярной системой координатных перемещений. Эта система позволяет обслуживать рабочее пространство с большим объемом и облегчает планировку и компоновку рабочих мест и оборудования при создании робототехнических комплексов. Однако у этой системы координатных перемещений есть и недостаток. Им является затруднение обслуживания технологического оборудования, расположенного на небольшой высоте.
3. Робот со сферической системой координат, схема которого представлена на рис. 1.3, имеет две вращательные подвижные кинематические пары и одну поступательную. В отличие от предыдущей схемы, в рассматриваемой еще одна поступательная кинематическая пара заменена на вращательную, однако «рука» манипулятора всё ещё способна совершать поступательные перемещения. Форма рабочей зоны такого манипулятора представляет собой полый шар, ограниченный сферической и двумя плоскими поверхностями. Такие манипуляторы более громоздки по сравнению с предыдущими и нуждаются в более сложной системе программного управления.
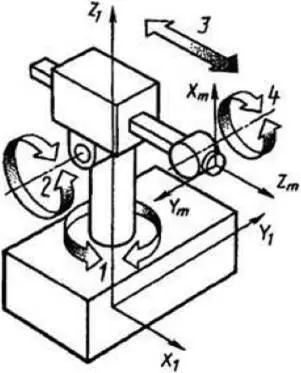
Рис. 1.3. Схема робота со сферической системой координат
Тем не менее, их высокая универсальность, наряду с возможностью обслуживания рабочих зон большего объема (в сравнении с манипуляторами прямоугольной и цилиндрической систем координат), определили их более широкое распространение.
4.Робот с ангулярной (угловой) системой координатных перемещений и сферической системой координат, схема которого представлена па рис. 1.4, имеет три вращательные подвижные кинематические пары, обеспечивающие степени подвижности.
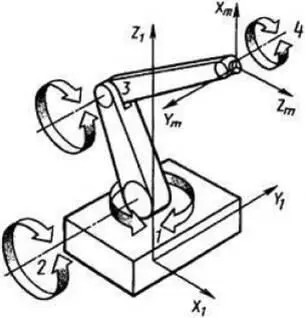
Рис. 1.4. Схема робота с ангулярной (угловой) системой координатных перемещений
Такую конфигурацию ещё называют антропоморфной. Положение и ориентация манипулятора в рабочей зоне такого робота определяются за счет изменения только угловых положений его звеньев друг относительно друга. Иными словами, манипулятор состоит из звеньев аналогично руке человека. Форма же рабочей зоны представляет собой сложное сферическое пространство, ограниченное сферическими и цилиндрическими поверхностями.
Ангулярная система координатных перемещений является достаточно сложной как с конструкторской точки зрения, поскольку необходимы специальные меры для повышения точности и жесткости манипулятора, так и с точки зрения программирования. В результате, помимо сказанного, требуется использование более сложных устройств программного управления. В то же время, эти манипуляторы отличает высокая универсальность и наибольший объём обслуживаемой рабочей зоны. Благодаря этому они хорошо компонуются с оборудованием, позволяя минимизировать производственные площади.
5. Робот с полярной системой координатных перемещений и цилиндрической системой координат, схема его манипулятора представлена на рис. 1.5.
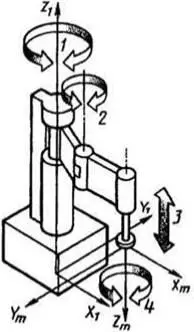
Рис.1.5. Схема робота с полярной или сложной цилиндрической системой координат
Степени подвижности данного манипулятора реализованы тремя вращательными одноподвижными кинематическими парами и одной поступательной одноподвижной кинематической парой. Манипулятор такого робота состоит из вращающейся колонны, или корпуса, присоединенного к нему и поворачивающегося в той же горизонтальной плоскости звена, на конце которого в направляющей перемещается вертикально «рука».
6. Кинематическая схема робота SCARA имеет две вращательные степени подвижности с параллельными осями, обеспечивающими плавные движения в выбранной плоскости, рис.1.6. Кинематика робота представлена на рис.1.7.
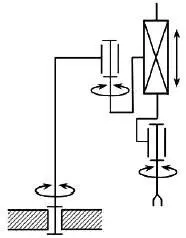
Рис.1.6. Кинематическая схема робота SCARA
Рис.1.7. Кинематика робота SCARA
Сочлененный манипулятор робота более широко используется для сборки во всем мире благодаря простоте и беспрепятственного монтажа. Роботы SCARA обычно имеют так называемую последовательную архитектуру, в которой один базовый двигатель должен нести все остальные установленные двигатели. Сам SCARA-робот, оригинальное исполнение. Один шаговый мотор приводит в движение внутренний рычаг, на котором установлен второй шаговик для привода наружного рычага. Промышленные SCARA-роботы используют именно этот вариант. Одним из недостатков этих типов роботов является то, что они чрезвычайно дороги по сравнению с довольно недорогими декартовыми роботами. Кроме того, для работы им требуется сложное программное обеспечение высокого уровня.
7. Параллельные роботы. Роботы с параллельной кинематикой – роботы, звенья которых образуют замкнутые кинематические цепи с вращательными и поступательными шарнирами, имеющими параллельные оси. Структурная схема параллельного робота показана на рис.1.8.

Рис.1.8. Структурная схема параллельного робота
Параллельный робот специально разработан, чтобы оставаться жестким и противостоять всем нежелательным помехам и движениям, в отличие от серийных роботов-манипуляторов. Хотя каждый привод работает с определенной степенью свободы, их гибкость в конечном итоге ограничивается другими приводами. Его жесткость и прочность отделяют параллельные манипуляторы от серийных цепных роботов.
8. Роботы с комбинированной кинематикой-роботы, кинематика которых представляет собой комбинацию указанных выше схем.
Выбор системы координат определяет тип руки манипулятора и вид его зоны обслуживания.
1.2. Классификация роботов по типу управления
По методу управления, или степени непосредственного участия человека в управлении, роботы подразделяются на три класса:
1) биотехнические,
2) интерактивные и
3) автоматические.
Биотехнические роботы функционируют только с непосредственным участием человека-оператора, который фактически берет на себя управление исполнительными механизмами.
Читать дальшеИнтервал:
Закладка: