Юрий Почанин - Робототехника в промышленности

- Название:Робототехника в промышленности
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2022
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Юрий Почанин - Робототехника в промышленности краткое содержание
Робототехника в промышленности - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
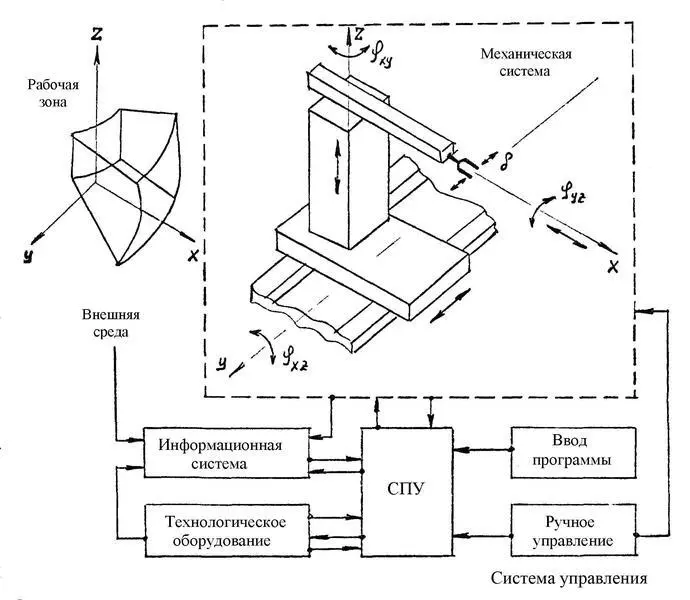
Рис.3.1. Стандартная схема работы технологического промышленного робота
Общая функциональная схема промышленного робота представлена на рис. 3.2.
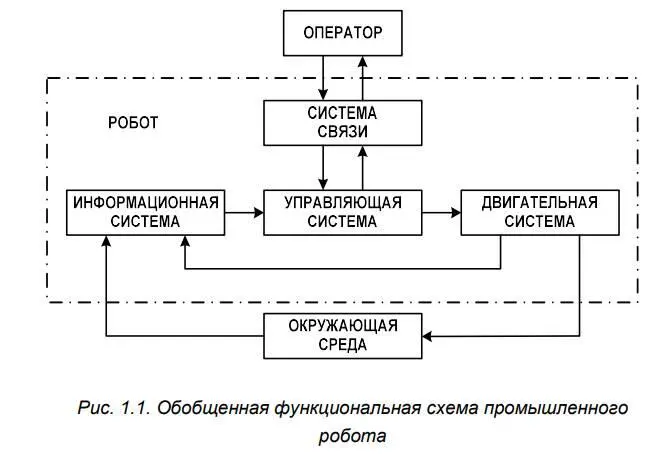
Рис.3.2. Общая функциональная схема промышленного робота
Управляющая (интеллектуальная) система – программируемое логическое устройство, предназначенное для формирования команд управления манипуляторами двигательной системы на основе анализа сигналов, поступающих от оператора и от информационной системы. Управляющая система робота предназначена, во-первых, для выработки закона управления приводами (двигателями) механизмов исполнительной системы, используя сигналы обратной связи от информационно-измерительной системы; во-вторых, для общения робота с человеком на каком-либо языке.
Двигательная (механическая) система состоит из комплекса исполнительных устройств (сервоприводов и манипуляторов), непосредственно воздействующих на окружающую среду. Механическая система манипулятора представляет собой кинематическую цепь, состоящая из подвижных звеньев с угловым или поступательным перемещением, которая заканчивается рабочим органом в виде захватного устройства или какого-нибудь инструмента. Манипулятор состоит из несущих конструкций, приводов, исполнительных и передаточных механизмов. Каждая степень подвижности манипулятора имеет свой двигатель (пневматический, электрический, гидравлический). В промышленных роботах часто используют волновые и планетарные редукторы, что позволяет уменьшить объем и массу сборочной единицы при высоком коэффициенте передачи. В промышленном роботе малой грузоподъемности используют традиционные зубчатые редукторы, а в тяжелых роботах – зубчатые редукторы в сочетании с винтовой парой.
Исполнительный механизм промышленного робота (механическая рука) осуществляет ориентирующие и транспортирующие движения. Чаще всего он имеет шарнирное исполнение. Рабочим органом промышленного робота является захватное устройство (сварочные клещи, окрасочный пистолет, сварочный инструмент и т.д.). Захватное устройство захватывает и удерживает объекты, перемещаемые манипулятором. Современные промышленные роботы комплектуют набором типовых захватных устройств.
Информационная система (ИС) обеспечивает сбор, первичную обработку и передачу в систему программного управления данных о состоянии внешней среды и о функционировании узлов и механизмов ПР, в том числе и блоков системы управления.
Система связи робота предназначена для организации обмена информацией между системами робота, между роботом и человеком или другими роботами на понятном им языке. Цель такого обмена – формулировка человеком заданий роботу, организация диалога между человеком и роботом, контроль за функционированием робота, диагностика неисправностей и регламентная проверка робота.
Информация от человека к роботу обычно поступает через пульт управления или через устройство ввода (набор команд с клавиатуры, речевое общение, ввод видеоинформации, ввод информации с помощью биопотенциалов и др.). Таким образом, человек может передавать информацию роботу как путем непосредственного ее занесения в память управляющей системы, так и путем воздействия через искусственные органы чувств
3.1. Механическая система
Механическая система (манипулятор) обеспечивает выполнение двигательных функций и реализацию технологического назначения ПР. Она обеспечивает движения выходного звена и закрепленного на нем рабочего органа в пространстве по заданной траектории и с заданной ориентацией.
Механическая система ПР образована двумя подсистемами – несущей механической системой (НМС) и исполнительной механической системой (ИМС). Особенность конструкции механической системы состоит в том, что одни и тс же элементы относятся как к одной, так и ко второй подсистемам, в состав которых в общем случае входят следующие элементы:
–опора, в виде основания или передвижных тележек напольного или подвесного типа;
–корпус робота различной формы с вмонтированными в него механизмами подъема и поворота руки и перемещения робота;
–корпус руки робота с вмонтированными в него механизмами перемещения руки, звена, а иногда и захватного устройства;
–рука робота с одним или несколькими звеньями;
–захватное устройство.
Кинематическое и компоновочное решения влияют на конструктивное исполнение элементов, определяющее конструкцию робота, которая, в свою очередь, определяет его основные характеристики: число степеней подвижности, маневренность, сервис, систему координатных перемещений и вид системы координат, в которой они работают. Основной рычажный механизм манипулятора может обеспечить полное соответствие этому условию лишь при наличии не менее чем шести управляемых степеней подвижности (свободы). В этом случае ПР представляет собой дорогую и достаточно сложную как в изготовлении, так и в эксплуатации автоматическую систему. В целях снижения стоимости и сложности ПР, по возможности, стремятся использовать механические системы с меньшим числом степеней свобод.
Опорные конструкции ПР выполняются в виде оснований, корпусов, стоек, рам тележек, порталов и т.п. Они служат для размещения всех устройств и агрегатов IIP, а также для обеспечения необходимой прочности и жесткости манипулятора.
Манипуляционная система (манипулятор) робота представляет собой многозвенный пространственный механизм с разомкнутой кинематической цепью, первое звено которого (стойка) является основанием робота, а последнее несет рабочий орган, непосредственно взаимодействующий с объектом манипулирования. Система звеньев МС структурно связана в кинематическую цепь с помощью вращательных или поступательных пар.
Под звеном механизма понимают деталь (либо совокупность деталей с общим законом движения), которая в процессе движения и взаимодействия с другими звеньями остается жесткой, не изменяя своих размеров и формы. Неподвижное звено механизма называется стойкой, или основанием. Соединение двух соприкасающихся звеньев, допускающее их определенное относительное движение, именуют кинематической парой, или, сокращенно, парой. Если одно из крайних звеньев многозвенного механизма закреплено к основанию, а другое свободно, то такой механизм относят к группе механизмов с открытой, или разомкнутой, кинематической цепью.
Свободное абсолютно твердое тело (или звено), не связанное с другими телами, может совершать три независимых поступательных движения в направлении осей X, У, Z и три вращательных относительно них. Минимальное количество обобщенных координат, полностью определяющее положение и возможные направления движения тела, называют числом его степеней свободы, или степеней подвижности. Промышленный робот, который имеют 6 степеней свободы, а это значит, что он способен двигаться по 6 различным направлениям, представлен рис.3.3.
Читать дальшеИнтервал:
Закладка: