Игорь Акулов - Техническая подготовка командира взвода ПЗРК 9К38 «Игла»

- Название:Техническая подготовка командира взвода ПЗРК 9К38 «Игла»
- Автор:
- Жанр:
- Издательство:Издательство Томского политехнического университета
- Год:2011
- Город:Томск
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Игорь Акулов - Техническая подготовка командира взвода ПЗРК 9К38 «Игла» краткое содержание
В пособии изложены назначение, состав, тактико-технические характеристики, устройство и функционирование ПЗРК 9К38 «Игла», порядок проведения технического обслуживания и текущего ремонта элементов комплекса в войсковых частях, общие сведения об эксплуатации вооружения и военной техники, а также порядок работы командира взвода при подготовке и проведении занятий с личным составом.
Предназначено для студентов технических факультетов, проходящих военную подготовку по военно-учетной специальности «Боевое применение подразделений, вооружённых переносными зенитными ракетными комплексами ближнего действия».
Техническая подготовка командира взвода ПЗРК 9К38 «Игла» - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
6. В последующем через каждые 180° поворота ротора срабатывает другой датчик положения и соответствующая КВ.
7. За время не более 5 с ротор раскручивается до 100 оборотов в секунду, блок разгона отключается, а поддержание вращения возлагается на систему стабилизации оборотов (ССО) ОГС
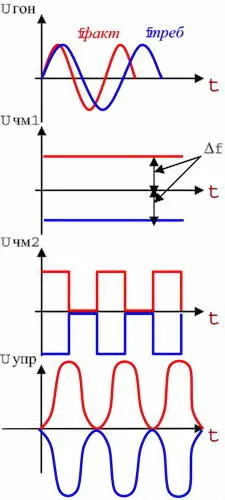
Рис. 31. К работе системы стабилизации оборотов ротора
Принципиально переключение катушек вращения происходит следующим образом:
А. Пусть ротор гироскопа имеет случайную ориентацию, как на рис. 32, и тогда постоянный магнит ротора создает магнитный поток Ф г.
Б. Магнитные сердечники индуктивных датчиков положения (ДП 1,2) имеют некоторую исходную намагниченность и создают магнитные потоки Ф дп1,2.
В. Ф г, замыкаясь через сердечники датчиков, изменяет их намагниченность:
• Ф дп1— ½Ф г;
• Ф дп2+ ½Ф г.
Таким образом, в этом положении ротора максимальную намагниченность приобретет сердечник ДП2 (т. к. Ф дп2+ ½Ф г), а значит его индуктивное сопротивление X L2 станет минимальным и, соответственно, увеличится ток в цепи ВЧ генератора, выпрямителя и падение напряжения на R п , приложенное к базе транзисторного ключа VT2.
Г. Срабатывая, ключ пропустит ток через соответствующую катушку вращения — КВ2.
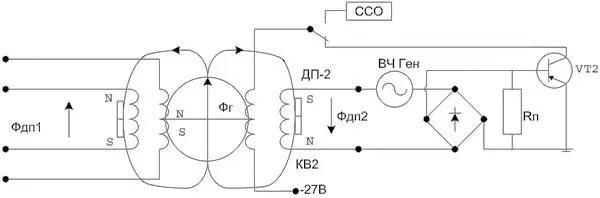
Рис. 32. Работа системы разгона ротора гироскопа
8. Задание и стабилизация оборотов гироскопа необходимы для поддержания частоты сканирования цели в узкой полосе пропускания усилительно-преобразовательного тракта сигнала ошибки наведения ракеты. Мы уже говорили, что частота сканирования цели принята равной 100 Гц и поэтому обороты ротора должны быть:
• 100 об/с — до пуска (нет вращения корпуса ракеты);
• 120 об/с — в полёте (так как корпус ракеты вращается относительно продольной оси в противоположном ротору направлении).
9. Датчиком фактической частоты вращения ротора является обмотка генератора опорных напряжений (ГОН), размещенная на статоре гироскопа. Магнит ротора наводит в ней синусоидальную ЭДС фактической частоты ( f факт ), которая прикладывается ко входу частотомера ССО.
10. В частотомере происходит:
а) сравнение f факт с требуемой ( f треб ) и преобразование информации об ошибке ( Δf ) в двуполярное постоянное напряжение, величина которого характеризует величину f , а полярность — необходимость разгона или торможения;
б) преобразование постоянного напряжения в импульсное с частотой ГОН ( f факт ).
11. Усилитель ССО усиливает управляющий сигнал по мощности, изменяет его форму на колоколообразную и запитывает катушки вращения гироскопа.
12. Катушки вращения создают магнитное поле, притормаживающее или ускоряющее ротор.
После разгона ротора гироскопа автомат разарретирования и пуска (АРП) пускового механизма обеспечивает коммутацию цепей включения в работу системы арретирования.
При этом:
1. Если оптическая ось координатора произвольно отклонена от продольной оси ракеты на некоторый угол пеленга Ψ , то постоянный магнит ротора, вращаясь, будет индуцировать:
а) в статорной обмотке пеленга синусоидальную ЭДС, амплитуда которой несет информацию о величине, а фаза — о направлении отклонения;
б) в обмотке заклона , размещенной в блоке датчиков пусковой трубы, синусоидальную ЭДС, амплитуда и фаза которой задают отклонение линии прицеливания от продольной оси ракеты на 10° вниз.
2. Так как обмотки включены встречно, то их разностный сигнал ошибки арретирования ( Δ арр ), отработанный до нуля следящим приводом координатора, обеспечит удержание оптической оси на линии прицеливания.
3. После прицеливания, нажатия на пусковой крючок и захвата цели (загорания лампочки) от следящего привода отключается сигнал ошибки арретирования Δ арр , формируемый ССО (координатор разарретируется), и подключается сигнал ошибки слежения Δε , формируемый КЦ (координатор начинает следить за целью).
Если излучение от цели не превышает сигнал фона, то АРП обеспечит периодическое арретирование гироскопа (лампочка мигает) и возможность захвата цели.
1. Благодаря размещению координатора цели на вращающемся роторе гироскопа осуществляется круговое сканирование положения цели относительно оптической оси в пределах поля зрения со стабильной частотой.
2. Тепловое излучение цели, фона и ЛТЦ селектируется и фокусируется оптической системой в виде пятен малого размера (1 мм) в фокальных плоскостях основного (цели) и вспомогательного (помех) каналов координатора. Положение пятен однозначно характеризует пространственное положение цели и помех относительно оптической оси координатора (ошибку слежения).
3. С помощью фотоприёмника сфокусированные тепловые потоки цели и помех подвергаются импульсной модуляции и преобразованию в информационные электрические периодические сигналы ошибки слежения. Причем важно, что в спектре сигнала цели содержится первая гармоника частоты сканирования (f скан), амплитуда которой характеризует величину, а изменение фазы в периоде сканирования (Т скан) — направление ошибки слежения за целью (Δε) .
4. Сигналы с выходов основного и вспомогательного каналов координатора поступают на схему переключения (СП) следящей системы, которая обеспечивает защиту от ЛТЦ путём стробирования (временной селекции) в периоде сканирования только сигнала цели. Сигнал цели с выхода СП поступает:
а) на избирательный усилитель;
б) на обнаружитель цели АРП пускового механизма.
5. Избирательный усилитель и амплитудный детектор используются для выделения из сложного сигнала цели информационного сигнала первой гармоники частоты сканирования.
6. Фазовращатель компенсирует временную задержку информационного сигнала в электронном блоке для управления в реальном масштабе времени.
7. В усилителе коррекции происходит повышение качества и мощности сигнала ошибки слежения. Как мы уже знаем, сигнал на выходе усилителя коррекции U ук является:
а) управляющим для исполнительного элемента следящей системы — катушки коррекции;
б) задающим для системы автоматического управления рулями — автопилота;
в) информационным для схем логической коммутации пускового механизма — автомата разарретирования и пуска.
8. Катушка коррекции создает внутри статора магнитное поле, вектор напряженности которого ( h к ) совпадает с продольной осью ракеты, а его направление и величина изменяются по закону сигнала ошибки слежения, т. е. h к≈ U ук .
Читать дальшеИнтервал:
Закладка: